In part one of this series, I took a look at some of my experiments using different voltage regulators, to design and build the Remote Alarm Transceiver prototype, and also mentioned that I will be looking at a single chip logic converter solution. In this (hopefully short) post, I will take a detailed look at that logic converter chip, as well as show you how it is used.
Some of the features of the device is listed below:
• AEC-Q100 Qualified for Automotive Applications – Device Temperature Grade 1: –40°C to 125°C – Device HBM ESD Classification Level 2 – Device CDM ESD Classification Level C6 • No direction-control signal needed • Maximum data rates – 110 Mbps (push pull) – 1.2 Mbps (open drain) • 1.4 V to 3.6 V on A port and 1.65 V to 5.5 V on B port (VCCA ≤ VCCB) • No power-supply sequencing required – either VCCA or VCCB can be ramped first • Latch-up performance exceeds 100 mA per JESD 78, Class II • ESD protection exceeds JESD 22 (A Port) – 2000-V human body model (A114-B) – 1000-V charged-device model (C101) • IEC 61000-4-2 ESD (B port) – ±8 kV contact discharge – ±6 kV Air-gap discharge
Datasheet description:
This device is an 8-bit non-inverting level translator that uses two separate configurable power-supply rails. The A port tracks the VCCA pin supply voltage. The VCCA pin accepts any supply voltage between 1.4 V and 3.6 V. The B port tracks the VCCB pin supply voltage. The VCCB pin accepts any supply voltage between 1.65 V and 5.5 V. Two input supply pins allows for low Voltage bidirectional translation between any of the 1.5 V, 1.8 V, 2.5 V, 3.3 V, and 5 V voltage nodes. When the output-enable (OE) input is low, all outputs are placed in the high-impedance (Hi-Z) state. To ensure the Hi-Z state during power-up or power-down periods, tie OE to GND through a pull-down resistor. The minimum value of the resistor is determined by the current-sourcing capability of the driver.
Typical Application:
Reference Design / Typical Application for the TXS0108E
My Thoughts:
I really like the tri-state (high impedance) mode of the chip, as it allows for isolation between the different voltage level circuits, for example, If I were to communicate on a 5v SPI bus, to another device, I can for instance put the chip in Tri-state mode, and not worry about stray signals interfering from the 3v side.
On the downside, the chip is very small, which makes it a real challenge to solder by hand. On the speed side, It is also not quite as fast as my usual MOSFET based circuitry. It does however do the job it was designed for quite well.
Updated Circuit
Integrating the chip into the existing Remote Alarm Transceiver circuit is very easy, allowing us to replace almost all of the Mosfet-based Logic level converters. We do still need a few of them, as we have only 8 bidirectional channels on the TXS0108.
Schematics
Some Notes on the schematics:
A battery level monitor is connected through a voltage divider, with a MOSFET as a switch to the A0 pin. The voltage divider is set up for a 12v DC input source. The MOSFET is controlled from the D6 Pin.
The reason that I did this is, that I found some parasitic voltage leakage through the A2D converter in a previous design, reducing battery life. My hope is that by only reading battery level when the MOSFET is on, there can be an increase in battery life ( Taking into consideration that the Voltage regulators are not very efficient, it won’t really amount to a big gain unless I switch to an SMPS in the future. )
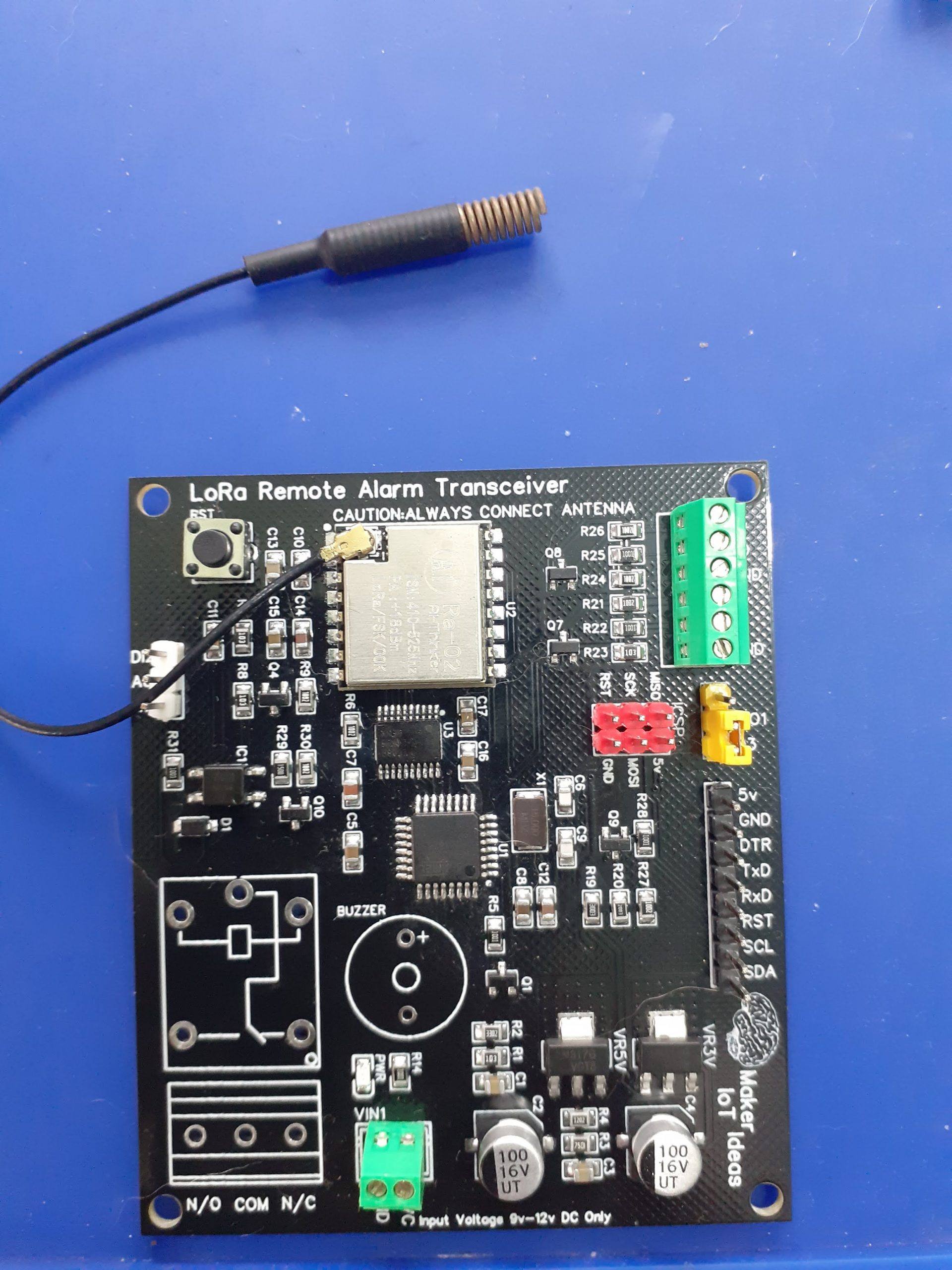
The PCB
The PCB
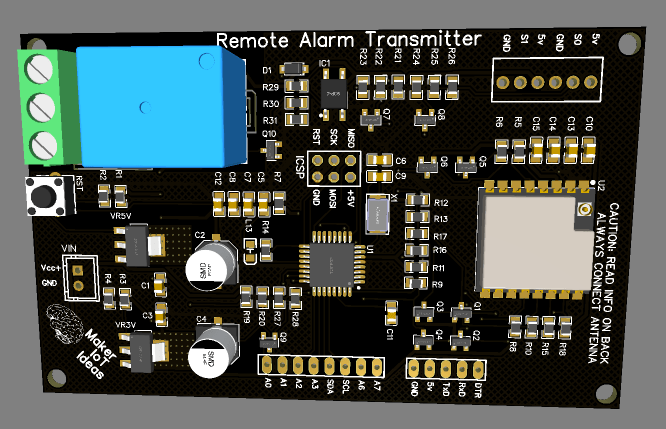
In the picture above, we can see the completed PCB (The relay and buzzer were not populated yet)
Manufacturing the PCB
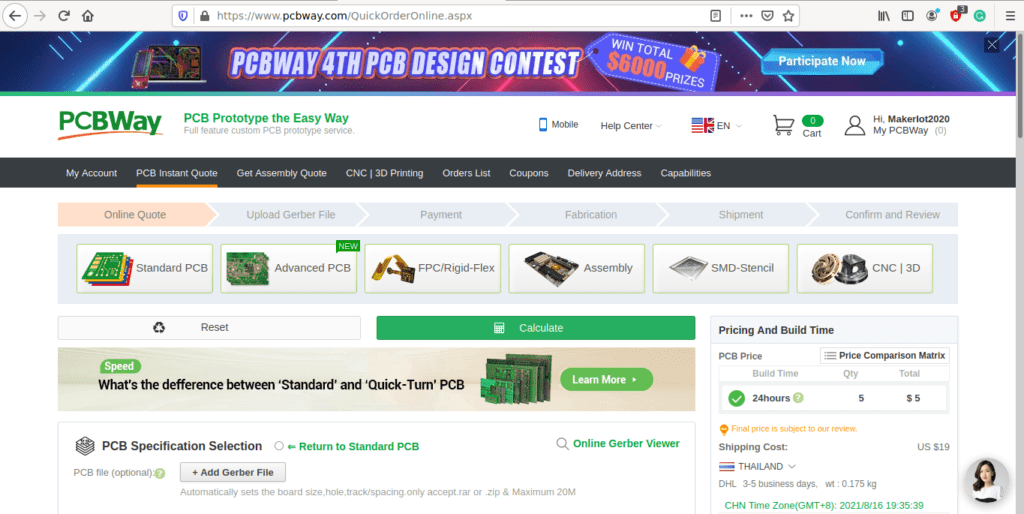
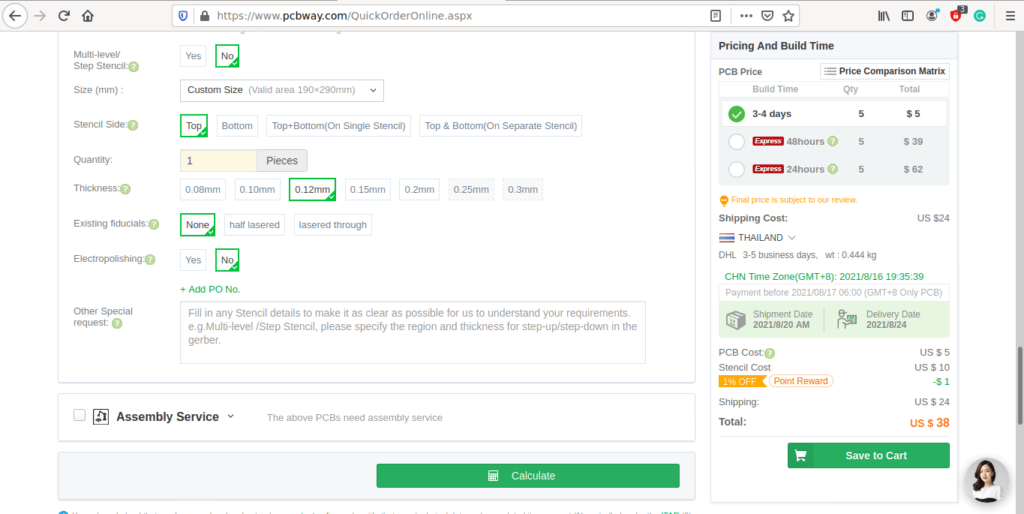
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
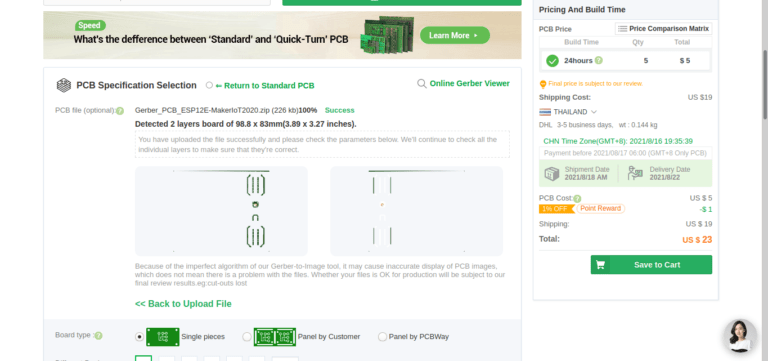
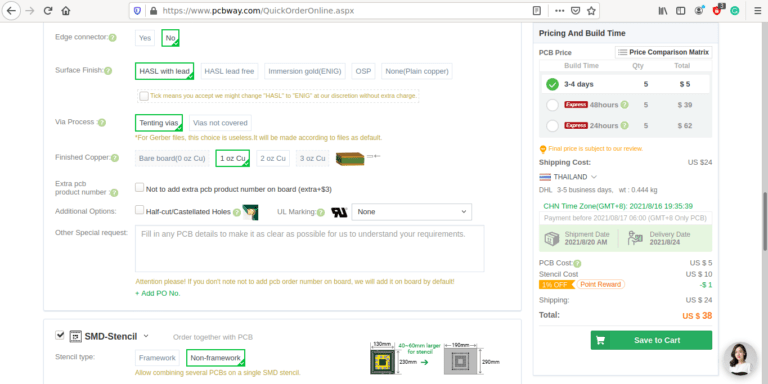
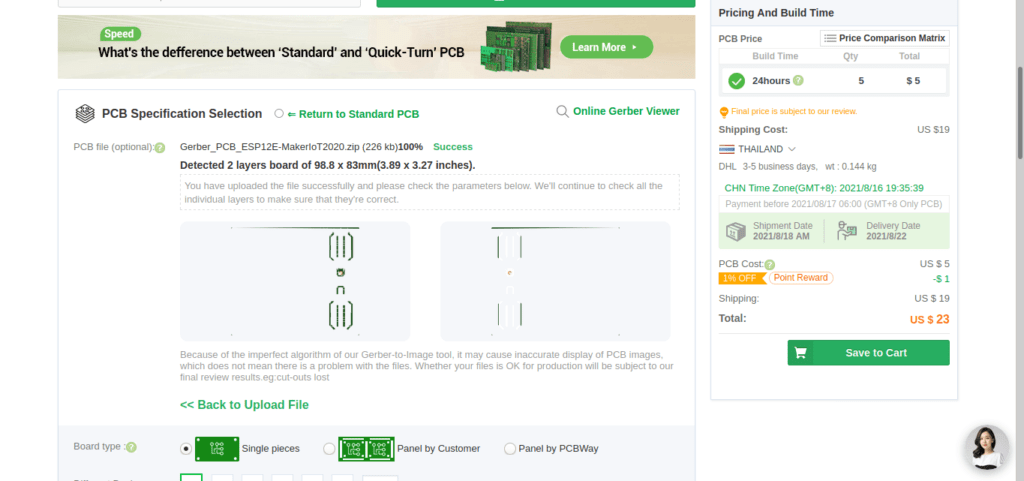
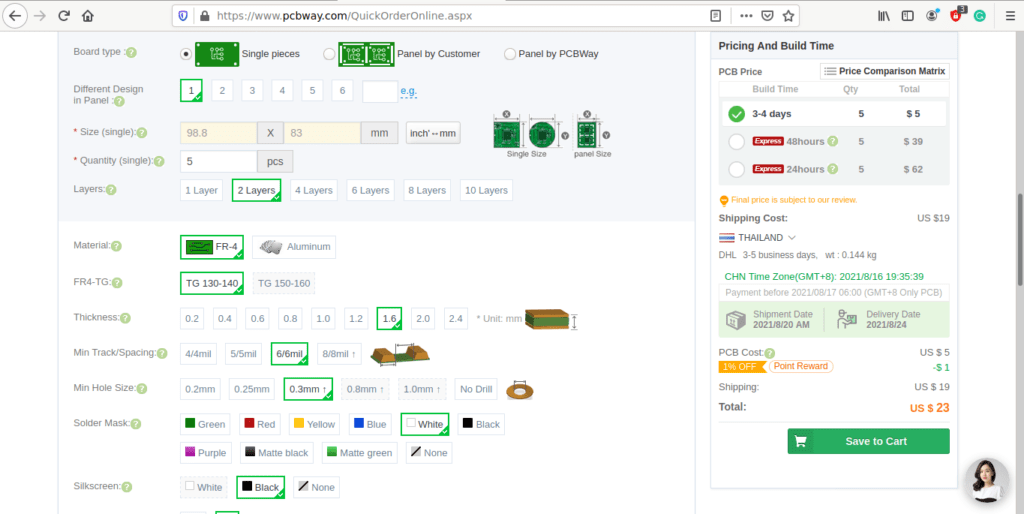
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
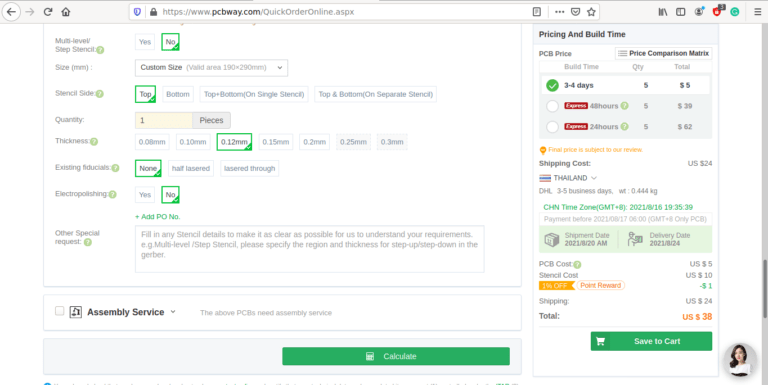
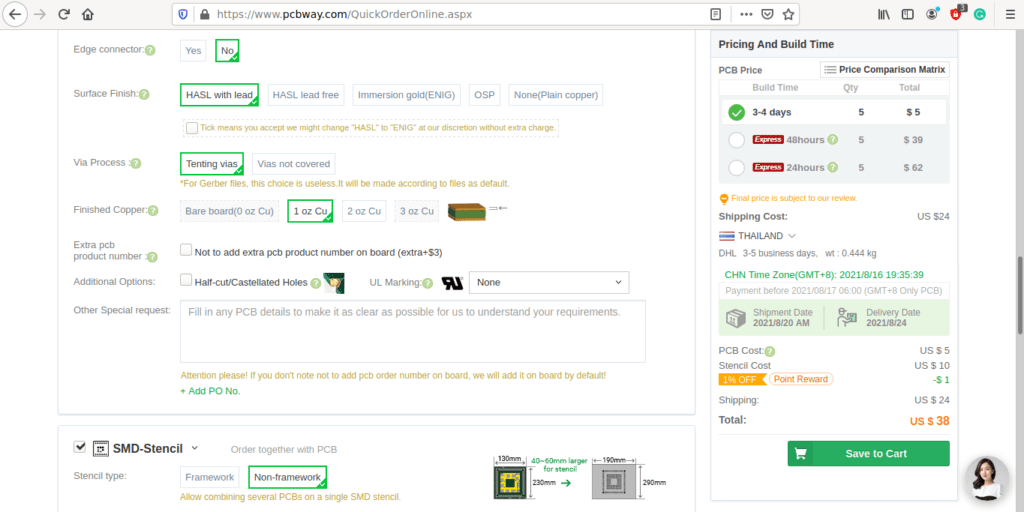
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
As part of my experiments with LoRa and the easy to use ATMega328P, I have recently designed quite a few LoRa based projects. In this final 2 part series, I will look at two additional projects, part of a Remote Alarm Transceiver, where I experimented with a changing a few things:
– Using LM317G adjustable voltage regulators. – Replacing my standard N-MOS based logic level converters with a dedicated chip.
LoRa Remote Alarm Transmitter – with Onboard Relay putout and two sensor inputs
How does this differ from my other LoRa Based projects?
The PCB presented above does in fact not really differ a lot from any of my existing LoRa based projects. However, there are a few subtle changes, mainly experimental changes, brought on by factors such as component availability and an attempt to reduce component counts and board size.
The first of these changes is using the LM317G voltage regulator, in the place of my usual LM1117 3.3 and 5.0 LDO regulators.
The LM317 is an old device, It has been on the market for a long time. It can supply up to 1.5A of current, and a single device can be configured to supply a wide range of different voltages by just changing two resistors. This seemed quite attractive to me, as it is getting quite difficult to reliably get quite a few components on time, and with decent pricing in the post-Covid-19 world.
The second major change would be moving away from my existing N-Mos based Logic converter setup, where I used the BSS138 and 10K resistors as logic converters. This setup works perfectly, but it has the drawback of requiring quite a lot of components. for example:
To provide logic conversion to an RA-02 module, with access to all the IO Lines (GPIO0-5 included) required 12 BSS138 Mosfets and 24 10k resistors. This is quite a lot of components. A dedicated logic converter chip would thus be a much more attractive solution.
Driver circuitry for sensor Inputs, consisting of a simple transistor input, and an optically isolated Relay output completes the circuit.
Using the LM317
The output voltage of the LM317 is typically set using two resistors, with a suitable current rating, using the following Formula
VOUT = 1.25 * ( 1 + R2/R1 )
It is also common to use a variable resistor at R2, to have fine control over the output voltage. This is due to the fact that stock resistor values do not always give you the exact voltage you require. You should also take into account that using a 5% resistor will be less accurate than a 1% resistor.
The grid below is a list of common stock resistor values for R1/R2, with the resulting voltage produced.
R1 vs R2 Grid for use in selecting fixed output voltage
R2\R1
150
180
220
240
270
330
370
390
470
68
1.82
1.72
1.64
1.60
1.56
1.51
1.48
1.47
1.43
82
1.93
1.82
1.72
1.68
1.63
1.56
1.53
1.51
1.47
100
2.08
1.94
1.82
1.77
1.71
1.63
1.59
1.57
1.52
120
2.25
2.08
1.93
1.88
1.81
1.70
1.66
1.63
1.57
150
2.50
2.29
2.10
2.03
1.94
1.82
1.76
1.73
1.65
180
2.75
2.50
2.27
2.19
2.08
1.93
1.86
1.83
1.73
220
3.08
2.78
2.50
2.40
2.27
2.08
1.99
1.96
1.84
240
3.25
2.92
2.61
2.50
2.36
2.16
2.06
2.02
1.89
270
3.50
3.13
2.78
2.66
2.50
2.27
2.16
2.12
1.97
330
4.00
3.54
3.13
2.97
2.78
2.50
2.36
2.31
2.13
370
4.33
3.82
3.35
3.18
2.96
2.65
2.50
2.44
2.23
390
4.50
3.96
3.47
3.28
3.06
2.73
2.57
2.50
2.29
470
5.17
4.51
3.92
3.70
3.43
3.03
2.84
2.76
2.50
560
5.92
5.14
4.43
4.17
3.84
3.37
3.14
3.04
2.74
680
6.92
5.97
5.11
4.79
4.40
3.83
3.55
3.43
3.06
820
8.08
6.94
5.91
5.52
5.05
4.36
4.02
3.88
3.43
1000
9.58
8.19
6.93
6.46
5.88
5.04
4.63
4.46
3.91
1200
11.25
9.58
8.07
7.50
6.81
5.80
5.30
5.10
4.44
1500
13.75
11.67
9.77
9.06
8.19
6.93
6.32
6.06
5.24
1800
16.25
13.75
11.48
10.63
9.58
8.07
7.33
7.02
6.04
2200
19.58
16.53
13.75
12.71
11.44
9.58
8.68
8.30
7.10
2700
23.75
20.00
16.59
15.31
13.75
11.48
10.37
9.90
8.43
3300
28.75
24.17
20.00
18.44
16.53
13.75
12.40
11.83
10.03
As you can see from the table above, using stock resistors, the output voltage is reasonably accurate, but it is quite obvious that you will need a potentiometer to get exact values. Another issue will definitely be heat dissipation. In my PCB design, I have used the SOT-223 package of the component, with a PCB heatsink, built directly into the layers. With the LM1117 LDO regulators, these work extremely well.
Logic Level Conversion
In this design, I used my standard Logic Level conversion circuit, comprised of a BSS138 N-Mos with two 10 k resistors. This circuit, although a bit cumbersome with lots of components if you need many logic converters, is very stable, and functions extremely well.
Conclusion
This circuit was designed as a two-part prototype, with the goal of experimenting with different voltage regulators, and in part 2, with a single chip 8 channel logic converter. As such, I do not feel comfortable releasing the full schematics to you at this stage, do so anyway in the interest of learning. The circuit works, but there are many issues with the regulators:
– Overheating at input voltages above 8.0v The PCB heatsink will have to be improved, or even a different package for the LM317 with the possibility to attach an external heatsink.
– The voltages do not seem stable, especially on the 3.3-volt side.
Manufacturing the PCB
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
CAN-Bus allows us to add a lot of devices to a single bus (theoretically up to 127, with a practical limit of about 110). It was logical to decide to use CAN-BUS for communication between my LoRa-CAN Module and remote nodes in my ongoing farm telemetry system. In a previous project, I introduced the LoRa-CAN Gateway, which will be used to send/receive messages from the master control unit, the SX127x-RA-02-Module.
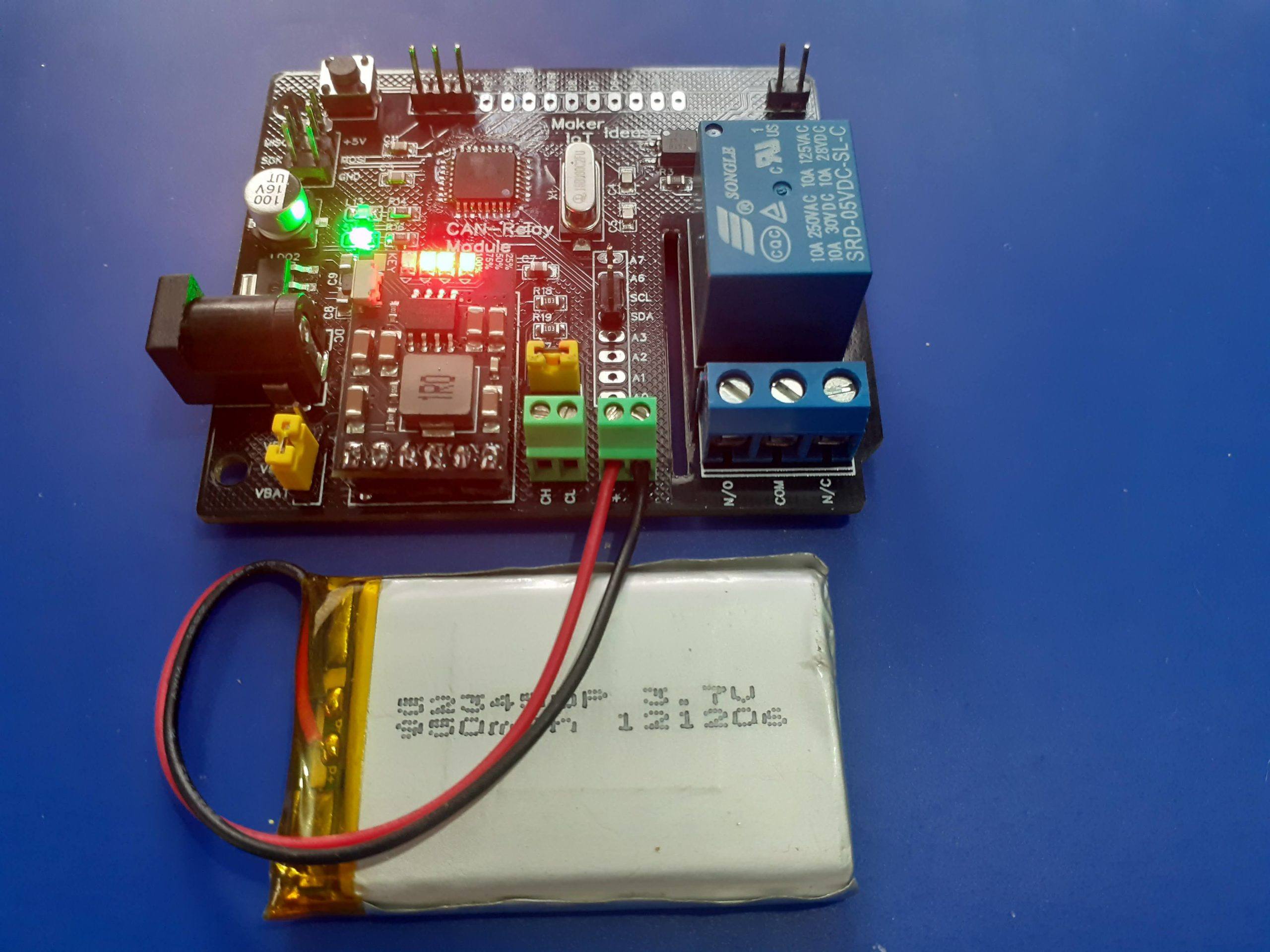
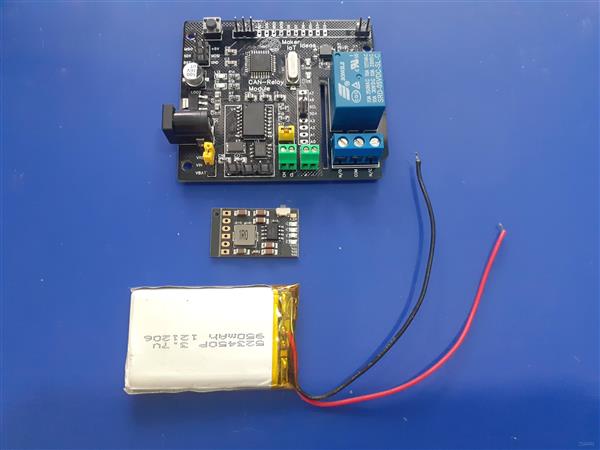
Today, I will focus on the design of the node device, an Arduino compatible CAN Relay Module PCB, with a built-in, CAN Controller and Transceiver ( MCP2515 and TJA1050 ), and the option to be powered from a LiPo battery (18650 or Single 3.7v Lipo cell), with charging provided by an MH-CD42 Module, similar to that used in the SX128x project mentioned above. The Module can also be powered directly from up to 12v DC by placing Jumper H2 in the V-REG position…
As mentioned in a previous project, the MH-CD42 module can provide up to 2A of current to charge a battery and provide 5V DC on a direct bypass circuit to power the rest of the circuit while the battery is being charged. This feature makes it ideal for my intended use, as I would only be needing battery power at night when the off-grid solar powered inverter is not actively charging the main batteries, and providing 220v AC.
The CAN Relay Module PCB was designed to be as compact as possible, with a total footprint of the standard Arduino UNO. As space was at a premium, and to ensure that there are the absolute minimum additional components that will consume power when operating from the battery, I have not included any USB-to-Serial converters onboard. Firmware can be uploaded with an AVRASp, USBASP, Arduino as ISP or even an external USB-to-Serial converter ( providing that you load a bootloader into the Atmega Chip).
All of the unused GPIO pins on the ATMEGA chip is broken out into headers, with the exception of D10 ( which is used as CE/SS on the MCP2515 CAN controller), D9 which is connected to the Interrupt from the MCP2515, and D4, which is used to control the onboard Relay.
The MH-CD42 Module, and LiPo or 18650 Battery are completely optional, The device can function without these, by moving the H2 jumper to the VREG position as already mentioned above. This will divert the DC Voltage(Up to 12v) from the DC input adapter to the build-in 5v LDO voltage regulator to power the device.
If you place the H2 Jumper in the VBAT position, you need to install the MH-CD42 module to provide power to the rest of the PCB, as well as keep the LiPo battery or 18650 Cell charged…
Please NOTE:
When the MH-CD42 module is in use, the total DC input voltage through the DC input adapter SHOULD NOT exceed 5.5v DC! This is a limitation in the operating parameters of the MH-CD42 module. Not paying attention to this will result in damage to the MH-CD42 Module.
You could also power the module with REGULATED 5v DC, directly from any 5v header pin. Please note that in this case,
1) The battery won’t be charged.
2) The LDO regulator will not be in operation.
The Microcontroller
The CAN Relay Module can use any of the ATMEGA8a/88/168/328 AVR microcontrollers, as the pinout is identical. I believe this is an advantage, especially with the current chip prices, where my last quote for an ATMEGA328P-AU was 69$USD!!!! This is in comparison to the 4 to 5 USD each for an ATMEGA8a or ATMEGA168 ( We must also remember though that the 328p is very well known, and thus have higher demand. The 8a/88 or 168 are less well known, have much less memory and flash area, and will thus be cheaper. A word of action though, I had strange issues with I2C on the Atmega8a with Mini core, to such an extent that I2C does not work at all?
If you plan to use I2C on this board, install a 328p right from the start, and save yourself a lot of headaches!
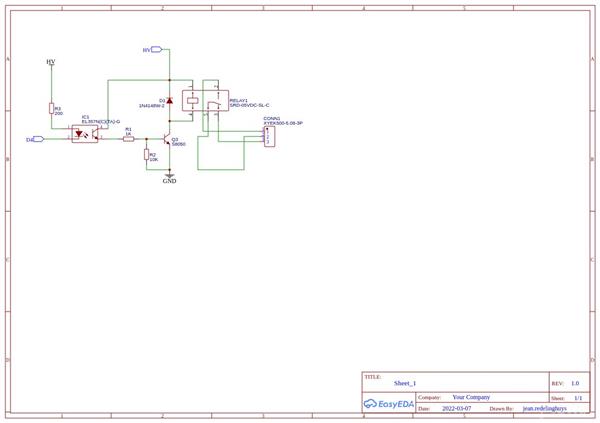
This is the Relay driver circuit. As you can see, it is optically isolated, and active LOW. This means that you have to pull D4 LOW to energise the relay. Also note that, although the relay is optically isolated from the microcontroller, the coil is NOT galvanically ISOLATED. The load, which is magnetically switched, will be truly galvanically isolated, providing of course that you don’t do something silly like using a common ground to the PCB as a common on the relay…
This is the Processor and Power-supply schematic. The circuit is basically a standard Arduino Nano, with modifications for the CAN Controller on the next schematic page. Note that the MH-CD42 is not shown on the schematic. The VBAT net connects directly to the VIN pin on the unit, with the BAT net connecting to the positive of the battery. VOUt-5v from the module goes directly to the 5v net. All grounds are commoned.
This is the CAN Controller and Transceiver circuitry. The MCP2515 connects directly to the SPI bus on the microcontroller via D13, D12 and D11, with D10 as CE/SS and D9 as Interrupt or IRQ. It is important to note that although the MCP2515 is a 3v capable device, the TJA1050 Can transceiver is 5v only. This prevents us from running the PCB at 3v unless, of course, we change the TJA1050 out for a 3v capable device…
As I am currently working on the final integration of the two modules, I am not yet ready to publish my final code, showing the operation between the CAN-Bus and LoRa-to-CAN Gateway device in this post. Once I am happy that all issues are definitively sorted out, I will publish my code.
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
ATMEGA328P Module with integrated LoRa and CAN-BUS
INTRODUCTION
In my quest to perfect my LoRa telemetry system, I have gone through quite a few prototypes by this time. This post will focus on the next node design. Due to the fact that the area where I will deploy the system is quite large, but with roughly square boundary fence-lines, I decided to try and reduce the number of LoRa Radio nodes needed to cover the entire area. This opened up the opportunity to utilise CAN-BUS to attach sensor-only nodes to a Radio node and have them report status on exception as well as on requests from the radio node.
The device will thus function as a LoRa-to-CAN-BUS Gateway, with some local automation to control the transmission of data to the master station. This concept can also be adapted for use in other areas, such as home -automation, or an industrial setting.
At the heart of the device, I have stuck with the versatile ATMEGA328P, which, current chip shortages excluded, and current high prices excluded, are a very inexpensive chip, with lots of well-tested libraries, and a relatively low learning curve, largely due to its very wide use in the Arduino ecosystem.
The LoRa component is handled by the RA-02 or even RA-01H module, from AI-Tinker (not sponsored). This device, as we have seen in the previous prototypes, requires the use of logic level converters, due to the fact that it only accepts 3.3v logic levels. While I could get rid of those if I powered the ATMEGA328P from 3.3v, it would give rise to two problems, of which one will still force the use of level converters…
I chose to run the ATMEGA328P at 16Mhz, which basically forces me to use 5v to power the chip. The second reason is not so obvious unless you read a few datasheets very thoroughly…
The CAN-Bus component is handled by the MCP2515 Standalone SPI-to-CAN Controller, as well as the TJA1050 CAN Bus transceiver.
This is where things get interesting… The MCP2515 can operate on 3.3v, but the TJA1050 is a 5v only device. I could thus in theory use logic level converters only between the MCP2515 and the TJA1050, while running the rest of the circuit on 3.3v…
Given that I would rather run the ATMEGA328P on 16Mhz, as well as the fact that my LoRa Radio Module circuit, with its logic level converter circuitry, works extremely well, I decided not to change that, and keep the CAN Bus running at 5v all the way through, as I would still have to use a 5v regulator on the PCB anyway just for that purpose.
IO connections for LoRa and CAN BUS modules
You can order this PCB directly from PCBWay, by clicking here
Both of the two integrated components ( Lora and CAN ) are SPI devices. This means that they share common SCK, MISO and MOSI lines ( provided on the ATMEGA328P by pins D13, D12 and D11 respectively. The individual SPI device is then further selected for operation by the use of a CE pin, one unique pin per device, which is pulled low by the MCU to indicate to the device that it should pay attention to the data being transmitted on the SPI bus…
Both LoRa and CAN makes use of other pins as well, LoRa needs a Reset pin, connected to D9, a CS/CE Pin on D10 as well as a hardware interrupt pin, connected to D2. ( Note that this is for use with Sandeep Mistry’s LoRa Library. The Radiolib library would require an additional pin, usually connected to DIO1 on the LoRa module. The device does not provide access to those pins in its current layout, so you can only use it with the Sandeep Mistry library, for now at least… )
The CAN module uses a CE/CS pin at D4, with an IRQ pin on D6, which, although not a hardware interrupt pin, does have PCINT functionality.
Pins D10, D9 and D2 are not broken out for user access. although I decided to give access to D4 and D6, as well as the SPI bus, D11, D12, D13, to allow interfacing with logic analysers, or adding other SPI devices to the bus…
This brings us to a very interesting point… Does the two SPI devices actually play nice together? and what do I mean by “playing nice together”?
To answer that question, we are forced to first look at a bit of theory, as well as understand the fundamental differences between SPI and I2C…
The Difference between SPI and I2C
Most of us will be quite familiar with I2C, as it is a very common protocol used to connect sensors to a microcontroller. It consists of only two IO lines, SDA for data, and SCL for the clock. Each device on the bus has its own built-in address, like in the case of a PCF8574 IO expander, this address can be selectable between 0x20h and 0x27h. All of the devices share these common data lines, and will only respond when specifically addressed by the master controller… Unless you accidentally put two devices with the same address on the same bus, (if that would even work), there is no way that the wrong device would respond to any request for data…
SPI on the other hand, operates on a completely different principle, making it quite a few times faster than I2c, with data being simultaneously sent and received by the active device… SPI is also known as a four-wire protocol. Each device has a minimum of 4 data lines, namely SCK ( clock), MOSI ( for data transmitted FROM the Master TO the slave device ), MISO ( for data transmitted TO the master FROM the slave device) and a CE or CS ( Chip select ) pin.
SCK, MISO and MOSI are COMMON to all devices, meaning it is shared between all of them. CE/CS is a unique pin for EACH device, meaning that if you had four SPI devices on a bus, you would have to have four individual CE/CS pins!
A device will, or rather should only respond to data on the SPI-BUS IF the master pulls its respective CE/CS pin LOW. It should now very quickly become clear to you that this can become a very very complex mess, very quickly.
Let us take a very good example. the ST7789 SPI display module, has a cheap version, commonly sold on Ali-express, as we ll as other online stores. This particular module, I assume in a bid to make it easier to use, has the CE/CS pin internally pulled down to ground by default… So what about that, you may ask? What is wrong with that, as it saves you an IO pin?
It is in fact very wrong, a fact that you will very quickly discover if you ever tried using one of those displays on an SPI bus together with other SPI devices… Nothing will work, or only the display will work ( if you are lucky)
But why?
Pulling CE/CS LOW, signals to the chip that it should respond to instructions on the common SCK, MISO and MOSI lines. having the pin internally pulled LOW, thus forces that chip to always respond, even when it should not. Thus contaminating the entire SPI-BUS with garbage…
The answer to the question
After that very long-winded explanation, which is still extremely basic, it is time that we get back to our original question:
Does the Sx127x ( RA-02 ) Module and the MCP2515 Can Controller play nice on the same bus? The answer is not straightforward, as it comes down to which libraries you use…
Remember that the library must pull down the CE/CS pin of the device that it wants to communicate with. Some libraries wrongly assume that they are the only ones in use, and ignores the simple fact, that they should release the CE/CS pin AFTER EVERY transaction, to free up the bus for other devices to use it as well…
After extensive testing, I can however say that Sandeep Mistry’s LoRa Library, as well as the mcp_can library, does indeed play nice together. These two libraries do not keep the individual CE/CS pins pulled LOW, and allows the spi bus to be shared.
This is not the case with the ST7789 Module discussed above, where the hardware actually pulls the pin ow the entire time…
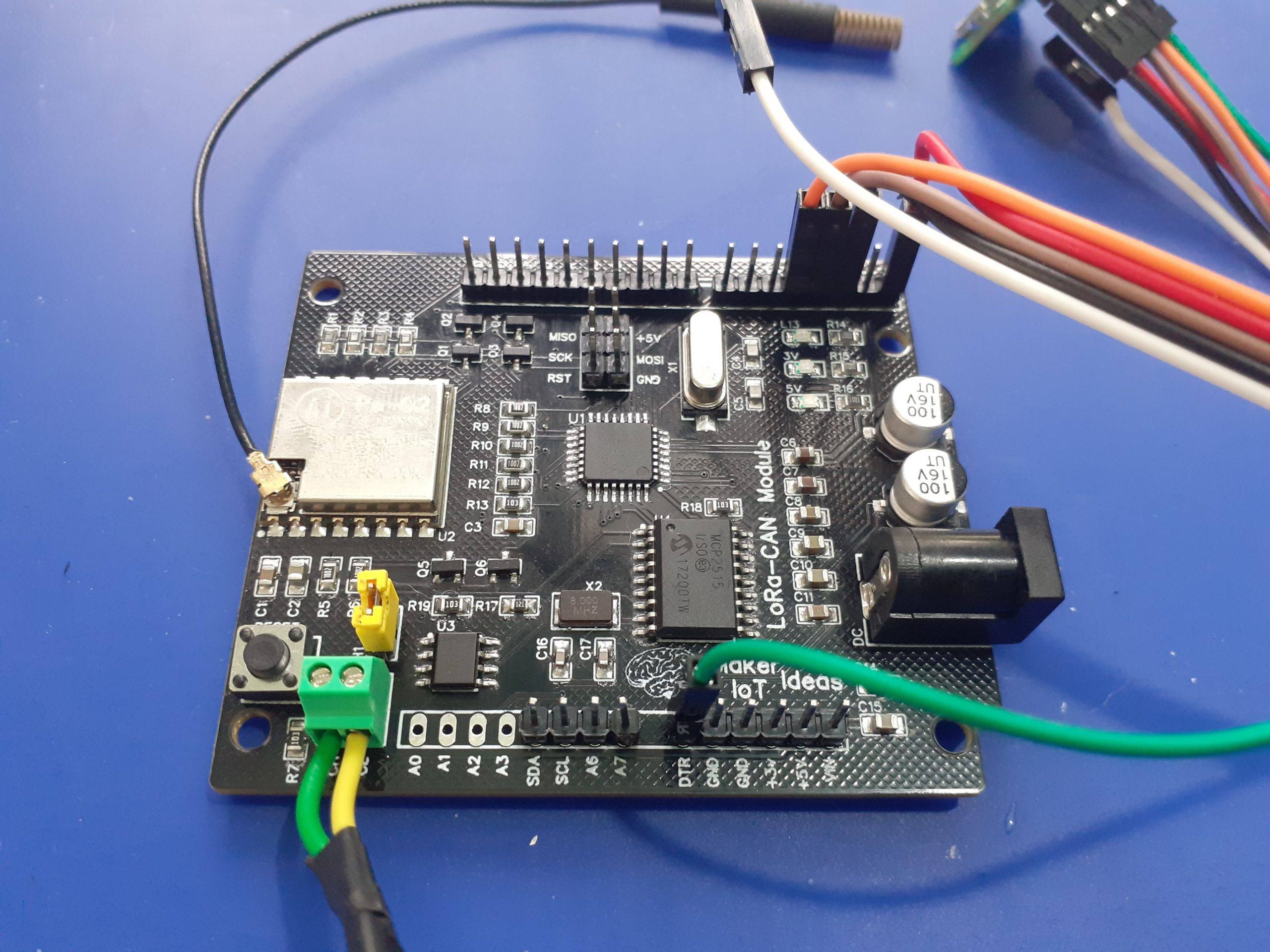
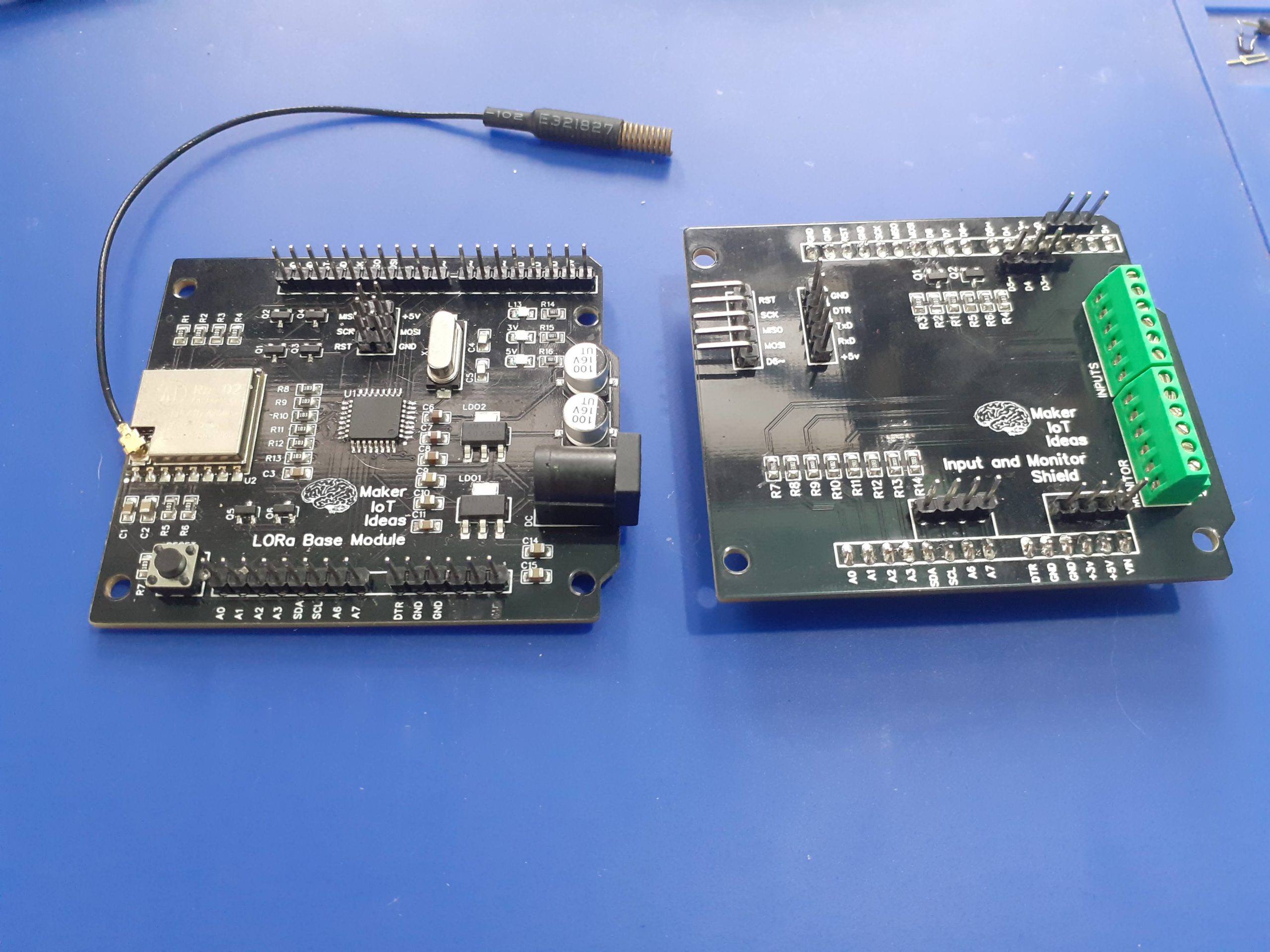
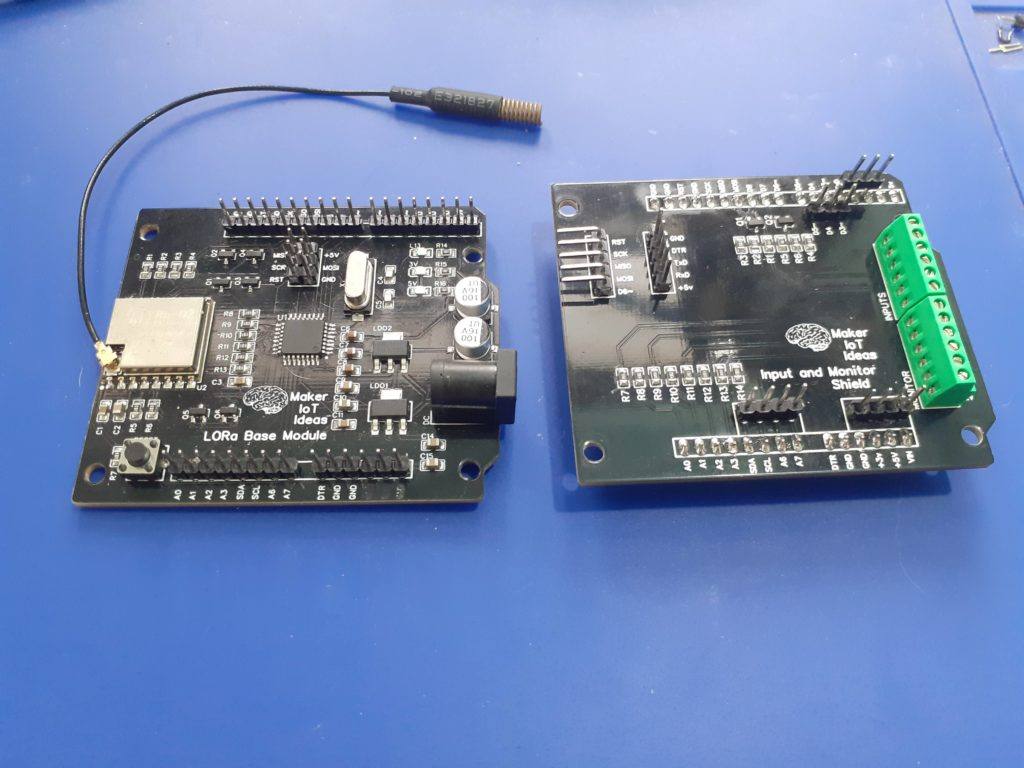
Taking a closer look at the PCB
Let us take a closer look at the PCB. The Ra-02 Module ( LoRa ) dominates most of the left-hand side of the PCB, with the ATMEGA328P on its right. The RA-02 is surrounded by the level converters, using the BSS138 N-Channel Mosfet, and 10k resistors (Q1 to Q6, R1, R2, R3, R4, R5, R6, R8, R9, R10, R11, R12, R13)
C1 and C2 are bypass capacitors for the Ra-02 module
In the bottom left corner, we have a hardware reset button, to reset the ATMEGA328P, with a yellow jumper (H1) next to it. This jumper controls the 120ohm ballast resistor (R17) for the CAN bus. Removing the jumper will remove the ballast. Directly below that is the CAN connecter, marked as U5, with CH as CAN-H, and CL as CAN-L ports.
U3 and U4, together with R18, R19, X2, C16, C17 make up the CAN components on the PCB. Decoupling is provided by C6, C7, C8 as well as C9 and C12 ( Includes the ATMEGA328P’s decoupling as well )
An ICSP programming header is provided above U1 ( ATMEGA328P) for use with USPASP, AVRASP or Arduino as ISP and similar.
No USB to serial converter is provided on the board, Serial upload is possible is loaded with an Arduino bootloader for the Arduino NANO ( to make use of all the analog inputs). RxD, TxD and DTR pins are broken out on opposite sides of the PCB, as well as access to 3.3v, 5v and GND pins.
A DC power socket is provided. it can accept up to 12v DC, although I would recommend not to go over 7.2 volts, to not stress the LDO regulators, at the back of the PCB ( LDO1, and LDO2) too much.
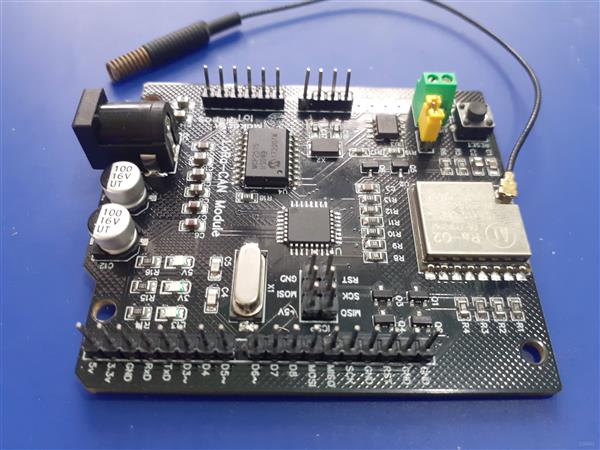
You can order this PCB directly from PCBWay, by Clicking here
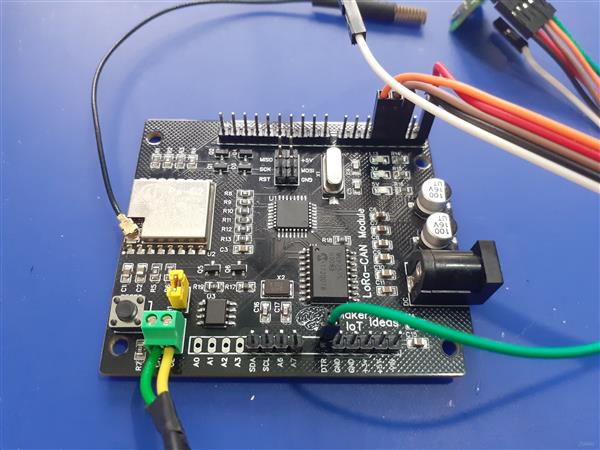
in the picture above, I have connected a USB-to Serial converter, as well as CAN-BUS to the device.
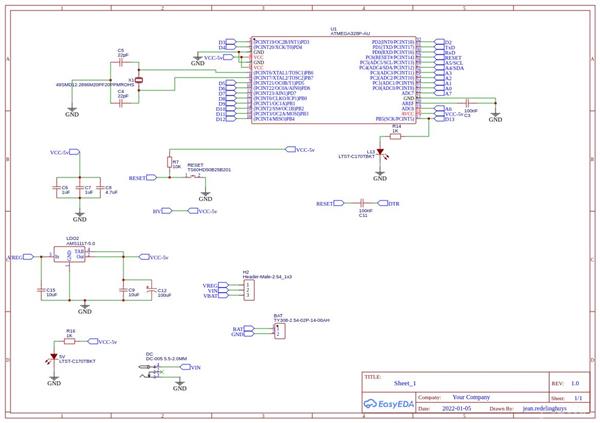
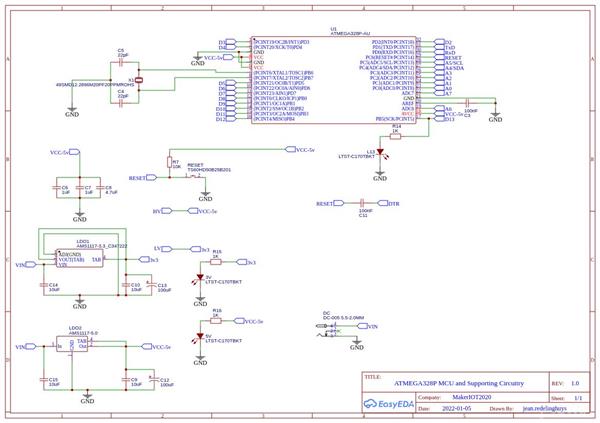
Schematic Diagram
The detailed schematic diagrams are provided below:
Sheet 1 (above) takes care of the ATMEGA328p and it supporting circuitry, as well as the power supply via LDO regulators.
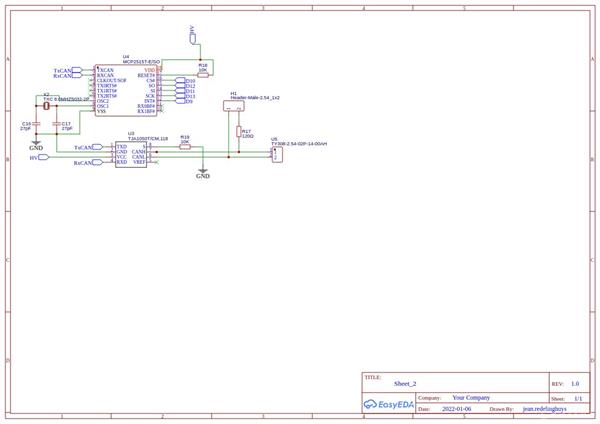
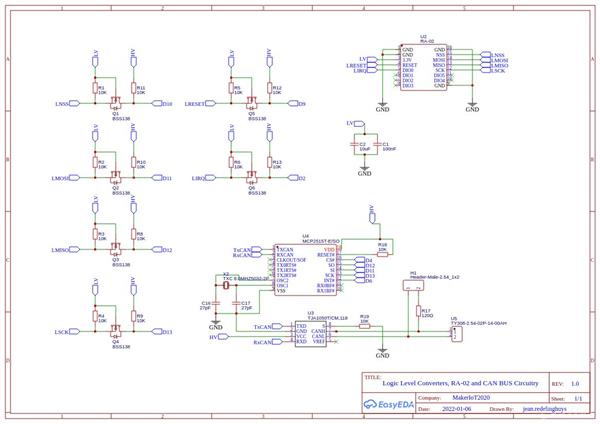
Sheet 2 (below) takes care of the Logic Level converters, RA-02 (Sx1278) LoRa Module, and CAN-BUS controller and transceiver circuitry.
A combined example utilising both LoRa and CAN at the same time, will be released with the next part of the project, namely the CAN-Relay Module
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
This is a straightforward project compared to my usual PCB projects. It is one of a series of designs towards completing my LoRa monitoring system, that I plan to use on the farm to monitor various areas, such as intrusion detection, battery levels etc.
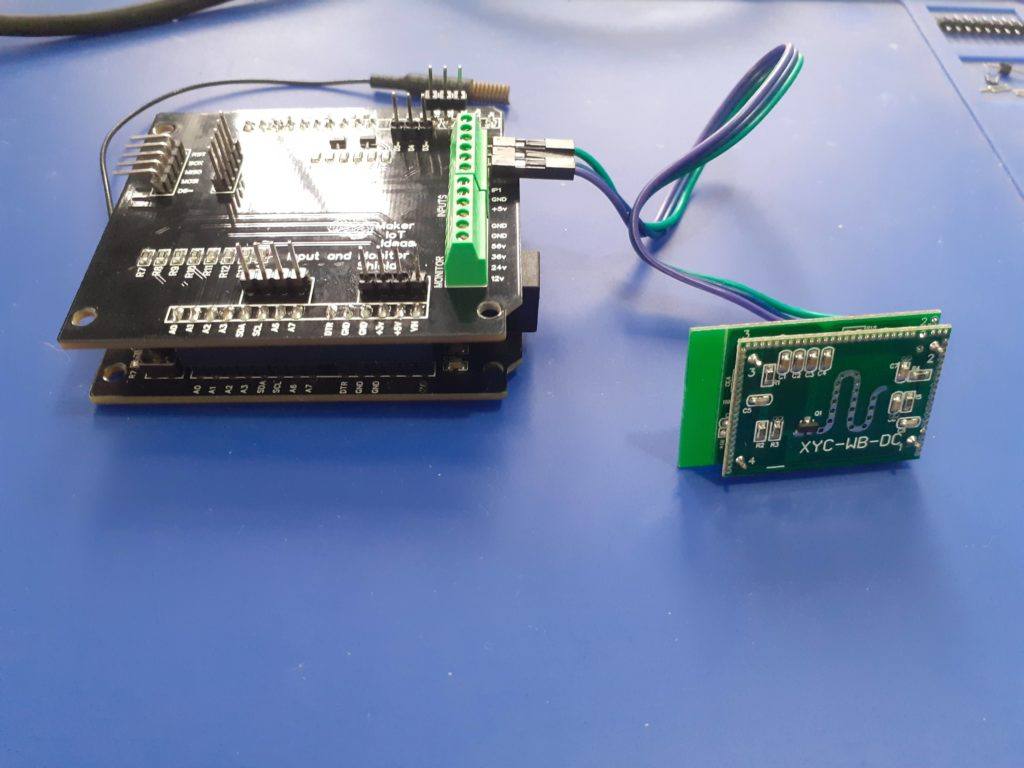
The shield was designed to fit on top of the first LoRa Base Module. It was designed to allow easy, neat connections to Infrared Beam sensors, XYC-WB-DC Motion Detector, as well as to monitor the battery levels at the Solar power inverter (the farm is completely off-grid).
The Motion Sensor provides a +3v signal that goes high on motion detection, while the Infrared Beam Sensor provides a relay contact that can be used to provide a similar voltage signal. As I prefer to use pull-up logic on my inputs, I decided to implement a simple transistor circuit where the input will switch the base of the transistor, which in turn will pull the input to signal ground when switched on. This circuit uses the S8050 transistor, with the base pulled down to signal ground via a 10k resistor to prevent floating, and a current limiting resistor of 1k to 1k8 on the base. The collector, as well as the D7 and D8 GPIO pins on the LoRa Base Module, is pulled High to Vcc5v via a 10k resistor.
Voltage monitoring is done with the ADC on the LoRa Base Module, with each of the 4 battery levels ( 12v, 24v,36v, and 56v) being connected to the relevant ADC channel via a resister-divider network to lower the respective voltage to a level between 0 and 5v. ( This was done as the ADC on the ATMEGA328p can only handle a maximum voltage of 5.0v )
The resistors were chosen to give a slightly bigger input voltage range, to accommodate for fluctuations from the solar charger ( It can sometimes go up to 65v on a very bright sunny day ). I decided to not add any current limiting resistors directly onto the PCB, as they are definitely going to be bulky. They will instead be attached externally, to suitable heatsinks, etc…
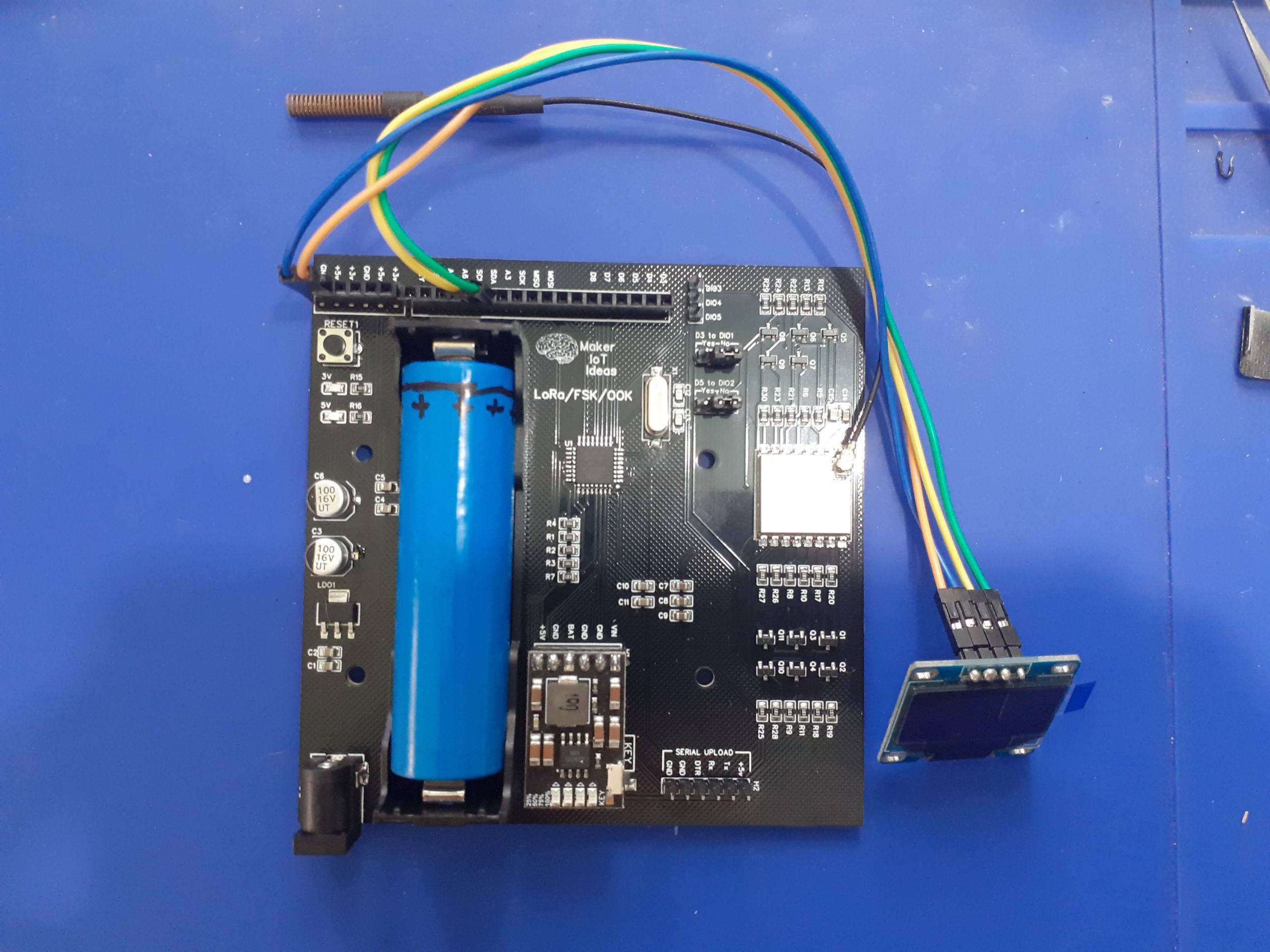
As this PBC is still in the prototype stage, and my LoRa Monitoring device will definitely go through quite a few modifications in future, I provided access to all unused GPIO pins via separate headers on the shield. Most notably the SPI Header, used for programming the ATMEGA328P MCU, or connecting other SPI devices ( I am working on a CAN bus addon for the device, to save on the number of physical radio nodes that needs to be installed), The UART Header, as well as I2C, A6, A7 and additional Digital IO Pins (D3~, D4, D5~).
In the photo above you will notice an additional header on the UART pins, This was added to assist me with debugging on the logic analyser, as I had a slight issue with waking up the ATMEGA328P, and getting it to send events via LoRa. It would wake up, print status messages through the UART, but never do the actual LoRa part! That has now been fixed, and the header removed…
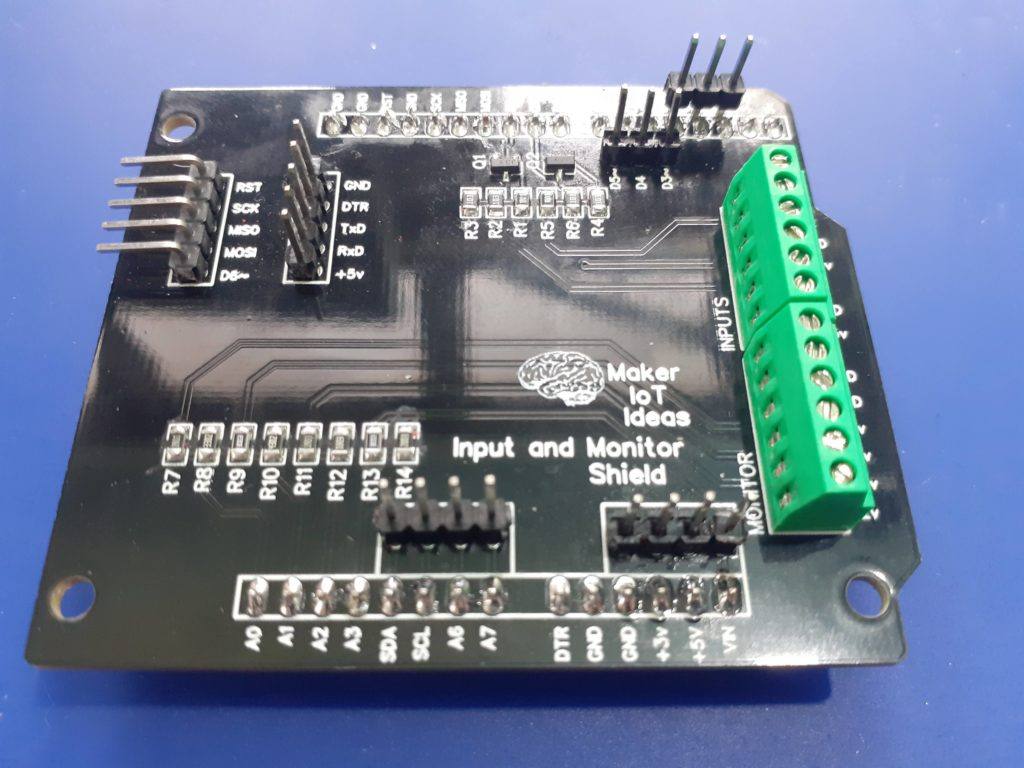
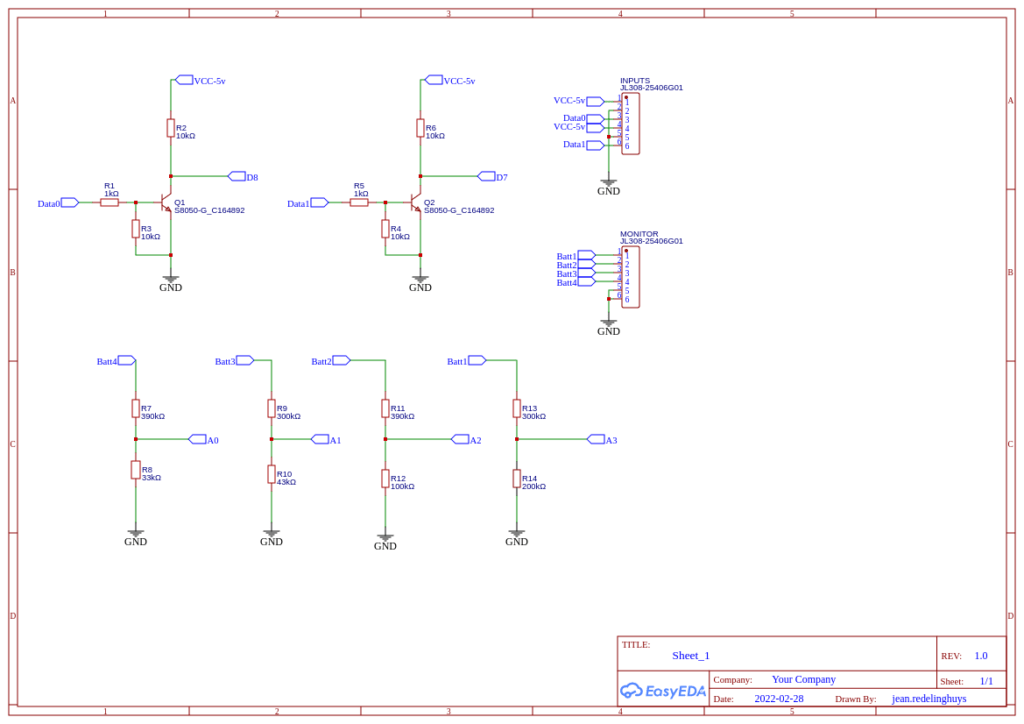
The schematic diagram for the shield is below. As you will see, it is very uncomplicated indeed.
The RA-02 Module (SX1278) connections to the ATMEGA328p is as follows:
NSS to D10 (CE)
MOSI to D11 (MOSI)
MISO to D12 (MISO)
SCK to D13 (SCK)
RESET to D9
DIO0 to D2 ( We need a hardware Interrupt pin ).
DIO1 to DIO5 was not broken out on the current version of the LoRa Base Module
There is also no direct access to pins D10, D9 and D2 either on the LoRa Base Module or on the Input and Monitor Shield.
If you do decide to hack the device and add access to any of the non broken out pins, please remember to use a logic level converter between the ATMEGA328 and the SX1278, as they operate at different voltages, and the SX1278 is not 5v tolerant on any of the IO Pins!
You can order this shield from PCBWay by clicking here
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
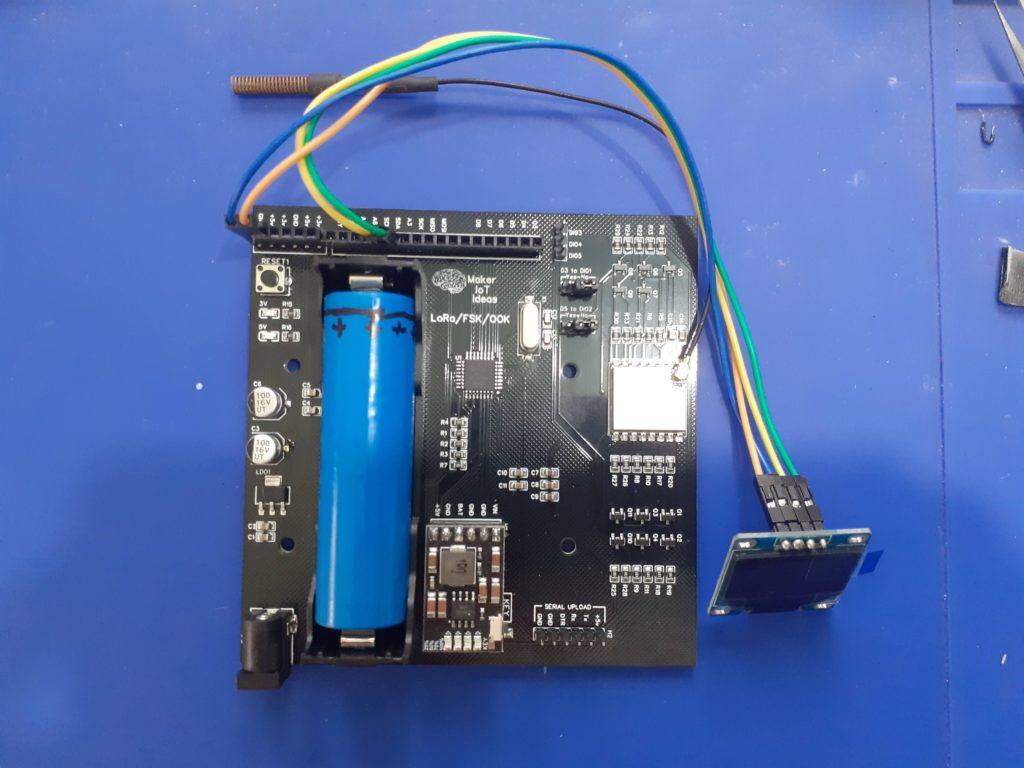
SX127x LoRa/FSK/OOK Module with LiPo battery-backup
SX127x LoRa/FSK/OOK Prototype Radio Board
I recently had a requirement to do some automation/telemetry on the farm. Things went missing, unauthorised persons were trespassing on the property, helping themselves to eggs, chickens, ducks and produce. Something had to be done, and as there is nobody sleeping there at night, it had to be possible to get remote status updates in real-time.
The farm is also completely off-grid, with solar-powered inverters taking care of all the water and electricity needs. Power usage monitoring could thus be a great help as well…
The idea is as follows:
Have a central control station, with various remote devices to do intrusion detection, control lights and water pumps, as well as monitor the battery levels of the inverter and solar-panel system. As the area is quite large, having to pull in electrical cabling will not be feasible, nor could the inverter handle all of that.
I decided to use the RA-02 LoRa/FSK/OOK module, on a custom PCB, but with various different PCB modifications, to take care of each stage of the project. The PCB that I will present today will be mainly used as the control unit, but it could also be a remote station, depending on what options are needed.
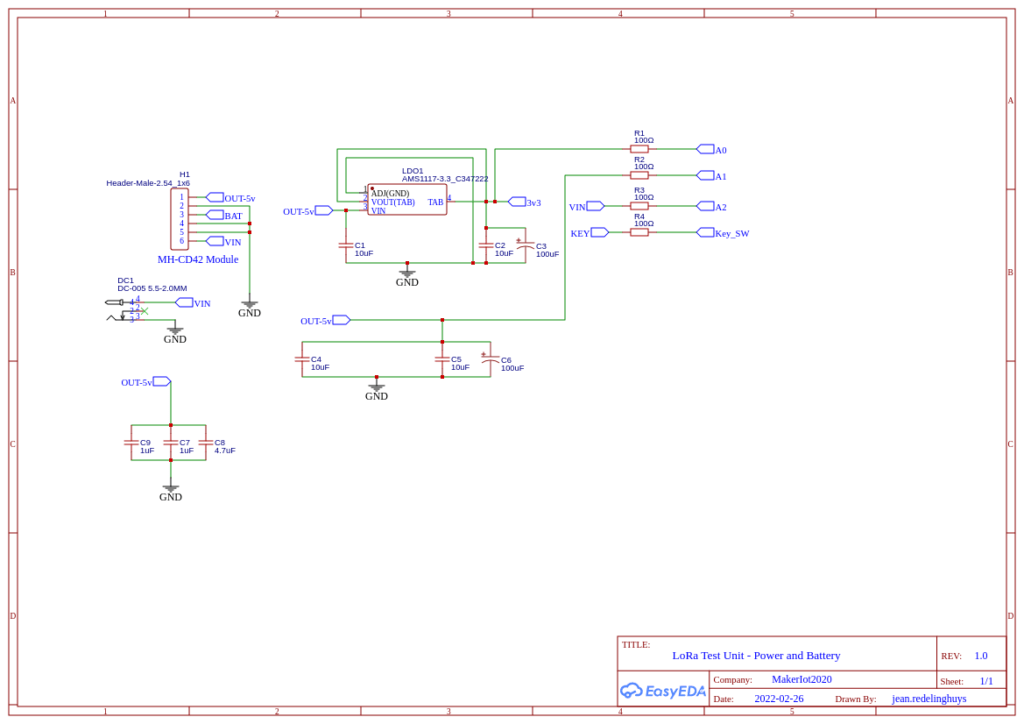
The ATMEGA328P-AU MCU is used as the main processor on each board, with the MH-CD42 Boost Converter/LiPo battery charger module taking care of power supply requirements. This module can source up to 2A at 5.0v, More than adequate for my needs. The ATMEGA328P will be put into sleep mode, to wake on interrupt to respond to events as needed ( To help save power ). Power usage of the circuit is around 50mA in standby ( NOT SLEEP MODE ), and with a peak of 100mA on a LoRa Transmit or Receive event.
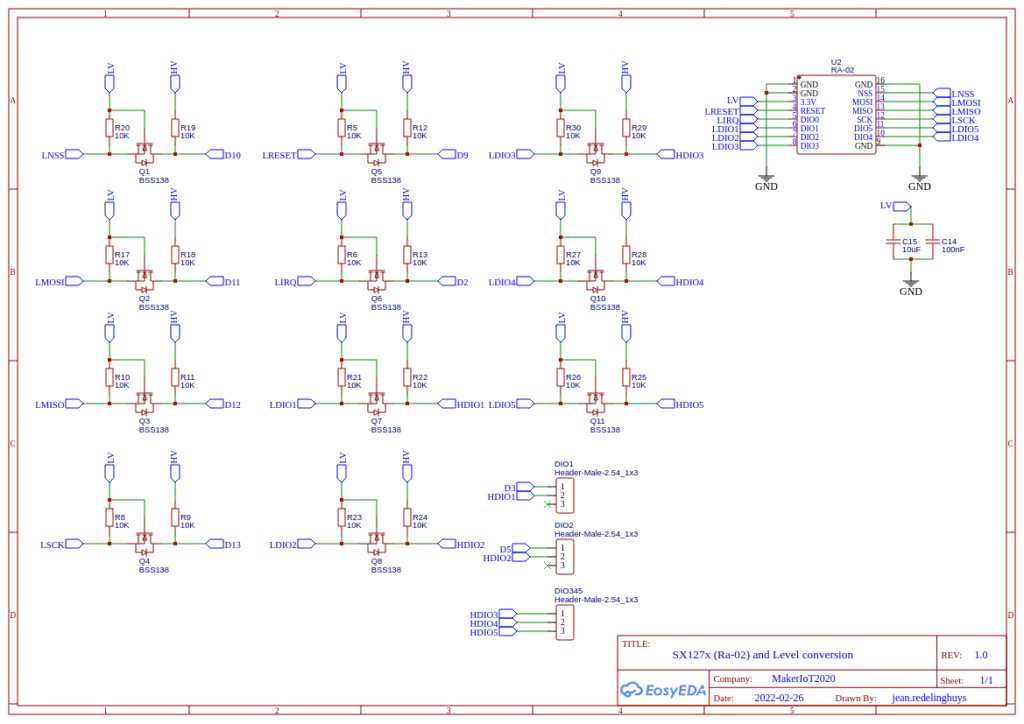
The RA-02 Module did however present some challenges, as it is a 3.3v device, with non-5v capable IO lines. This made it necessary to include a 3.3v LDO regulator, as well as logic level converting circuitry onto the PCB. To allow for the most flexibility, all DIOs on the RA-02 was also broken out via level converters, in addition to the required SPI pins ( MOSI, MISO, CE and SCK ). This amount to a total of 11 level converters onboard.
I chose the MH-CD42 Power module for the reason that it can supply current at the same time as charging the LiPo battery (in my case, I used a 18650 cell). This will help greatly, as 220v inverter power is available during the day to charge the batteries.
Another challenge was definitely the enclosure. I found some really nice enclosures online, but the mounting holes were located in a very particular pattern, making it necessary to do some very careful measuring to get the PCB to fit exactly. The enclosure also has space to accept the other PCB modules, like the USER Control panel, and other sensor devices as needed. PCBWay did a great job at manufacturing the PCB so as to fit exactly. I must admit that I had quite a few tense moments between sending the PCB off to manufacturing and receiving it, as to whether my measurements were actually accurate, and if the PCB would fit as I imagined…
As you can see in the picture above, it turned out perfectly.
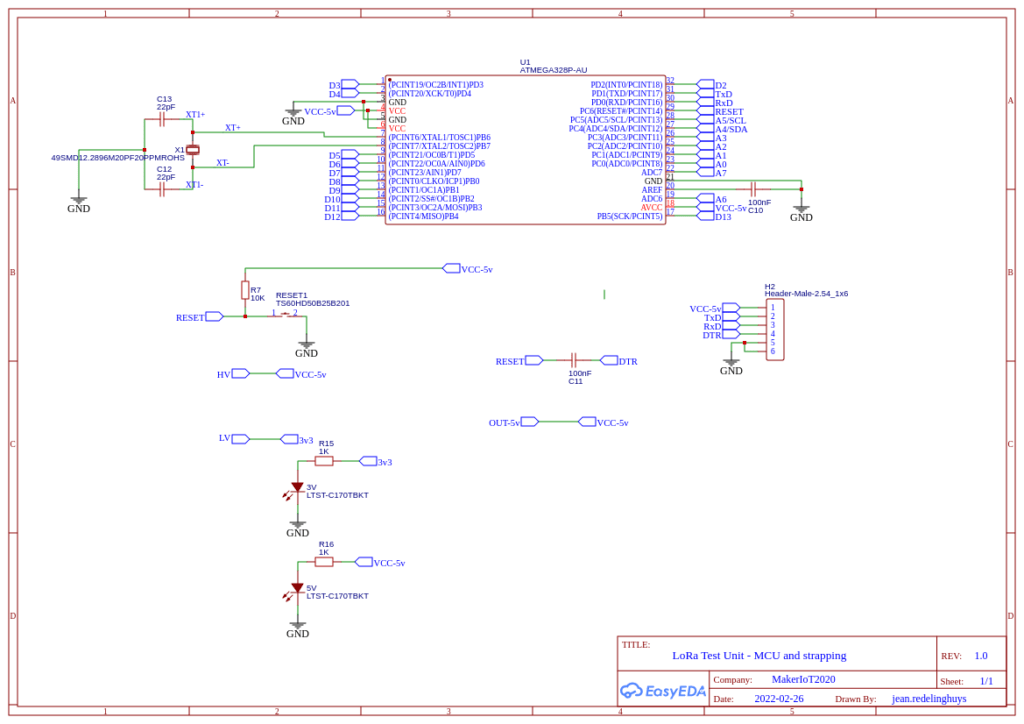
The Circuit diagram is basically a standard Arduino Nano ( I needed access to all of the ADC pins ),
Connections to the RA-02 module is as follows:
RA-02
ATMEGA328P
MOSI
D11
MISO
D12
SCK
D13
CE
D10
RESET
D9
DIO0
D2 ( We need a hardware interrupt pin here )
DIO1
D3 ( Hardware Interrupt, enabled through jumper)
DIO2
D5 ( Enabled through a jumper)
DIO3 to DIO 5
Not connected, available on a breakout header
Connections between Ra-02 (SX127x) and ATMEGA328P – Note that all IO Lines are connected through level converters 5v <-> 3.3v
On the ATMEGA328, the following pins are broken out into headers:
D3
can be connected to RA-02 with a jumper
D4
D5
can be connected to RA-02 with a jumper
D6
D7
D8
D13 ( SCK )
Broken out as a 5v logic pin
D12 ( MISO )
5v logic pin
D11 ( MOSI )
5v logic pin
A3,A6,A7
ADC Pins ( A0, A1, A2 is used internally to monitor VIN, VCC5v and VCC3v ) A0 = Vcc3v A1 = Vcc5v A2 = VIN
SCL
I2C SCL pin OR A5 (I2C pins are at 5v logic levels )
SDA
I2C SDA pin OR A4 (I2C pins are at 5v logic levels )
RESET
DTR
( connected through a 100nf Cap to Reset, used for serial uploading firmware )
D0 ( RxD )
UART Rx Pin ( 5v logic )
D1 ( TxD )
UART Tx Pin ( 5v logic )
ATMEGA328P breakout pins. All pins are at 5v logic level
The ATMEGA328P is clocked at 16Mhz through an external crystal.
3v, 5v and GND pins were broken out at two opposite corners of the PCB to allow easy connection of additional devices/ sensors as needed.
The MH-CD42 module has the capability to power a load while charging the LiPo battery. This makes it possible to do a few interesting things while supplying power to this particular PCB.
The board can be powered directly from a 5v header pin ( NOT from the DC1 input ). In this mode, a LiPo battery is not required.
5v will be directly supplied to the processor, as well as the 3.3v LDO regulator, allowing the RA-02 module to function as well.
PLEASE NOTE: THERE ARE NO 5v REGULATION – MAKE SURE YOU SUPPLY REGULATED 5v
Installing the MH-CD42 module will add the option of charging a 3.3v 18650 Lipo battery, as well as powering the board at the same time. You need to supply power through the DC plug to make use of this function. This mode is also a miniature uninterruptible power supply, with the 3.3v LiPo battery immediately taking over should the main DC input fail.
NOTE: The MH-CD42 can only accept up to 5.5v MAXIMUM as input!
Software:
The PCB can be used with LoRa libraries from Sandeep Mistry OR JGromes/RadioLib ( If you want to do FSK/OOK or other advanced stuff like LoRa of FHSS)
Both libraries have extensive examples showing how to use them. As our use case will definitely differ, I will not have any example here at this stage. I will add one later after the entire project is completed, with all the relevant modules.
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
In August of 2021, MakerIoT2020 released the MCU-8266-12E IoT Controller PCB, (part 1 is available here in case you missed that). Shortly after that, we started working on an expansion add-on card, that would work with the APE (Arduino Port Expander) protocol in ESPHome.
While I could have used a standard Arduino board for this, and in fact, I have done so during many of the testing stages, I decided to design a custom PCB specifically for this task, in order to achieve two specific things…
1). The standard Arduino Board comes in either a 5v logic or 3v logic device. While this is perfect for many projects, it is still sometimes required to use a logic level converter with some sensors and devices. LORA is a good example of that. As I really dislike using a breadboard, due to their inherent unreliable connections and the ever-present mess of wires going everywhere, I wanted an Arduino or ATMEGA328 based device that already has a level converter built-in.
As I could not find anything like that for sale, I decided to build my own, as you will see shortly.
2). I wanted to start moving away from using the Arduino IDE as much as possible. While the Arduino IDE is great for most tasks, It does lack in a few areas. I thus want to slowly ease myself back into using AVR C, and that requires a board that can be flashed via ICSP. ( yes, yes, you can flash an Arduino with ICSP as well. ) In the case of the planned expansion card, it would basically be a device that is flashed once and then left alone. Serial flashing would be quite unnecessary on there anyway.
The other reason, still part of point 2, is that it seems like everyone else is having all sorts of problems with fuses on the ATMega328 on custom boards etc… I wanted to see if that is really the case or not…
The PCB should also be useable as a standard “Arduino” type device to assist in prototyping and development.
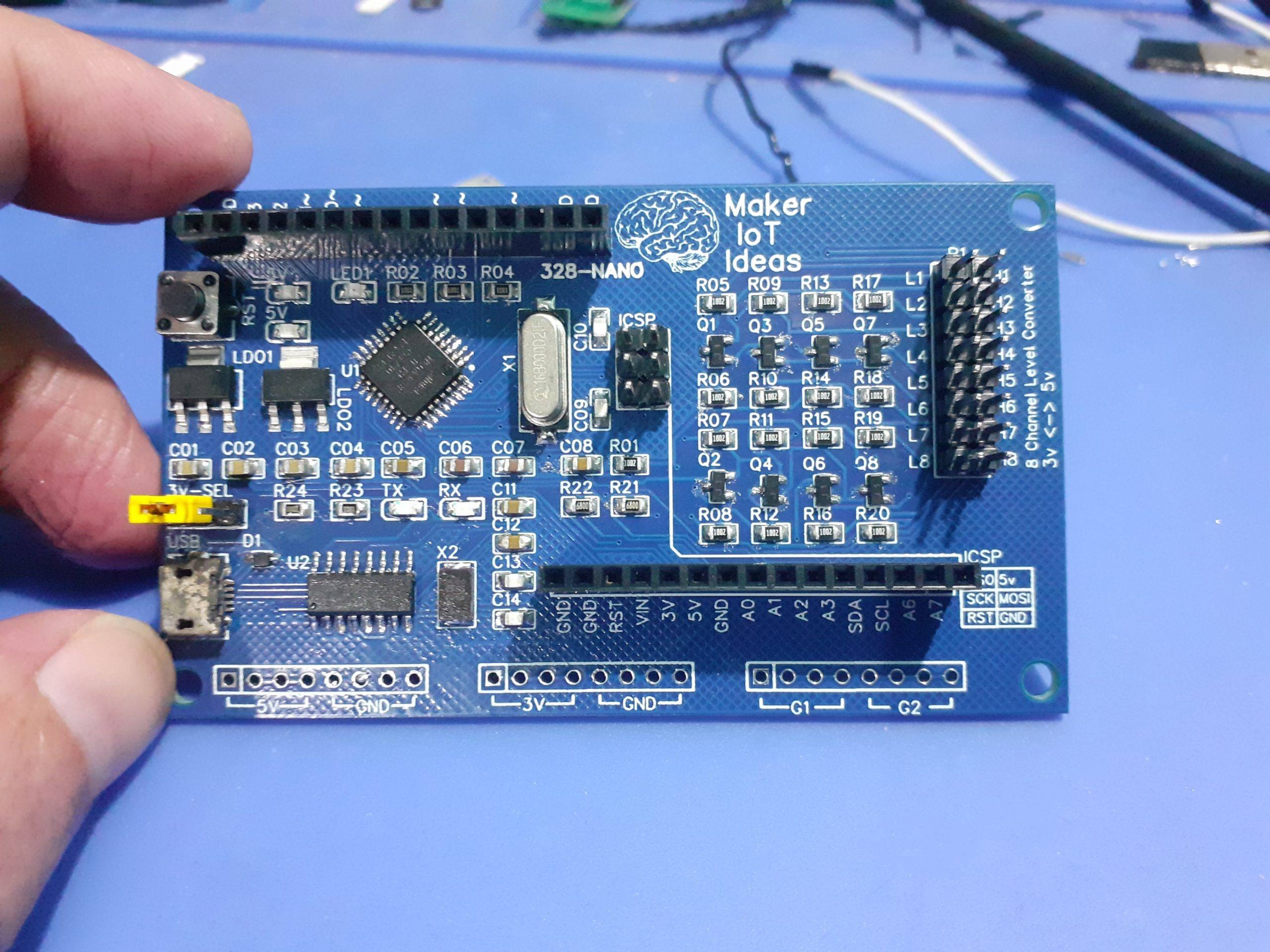
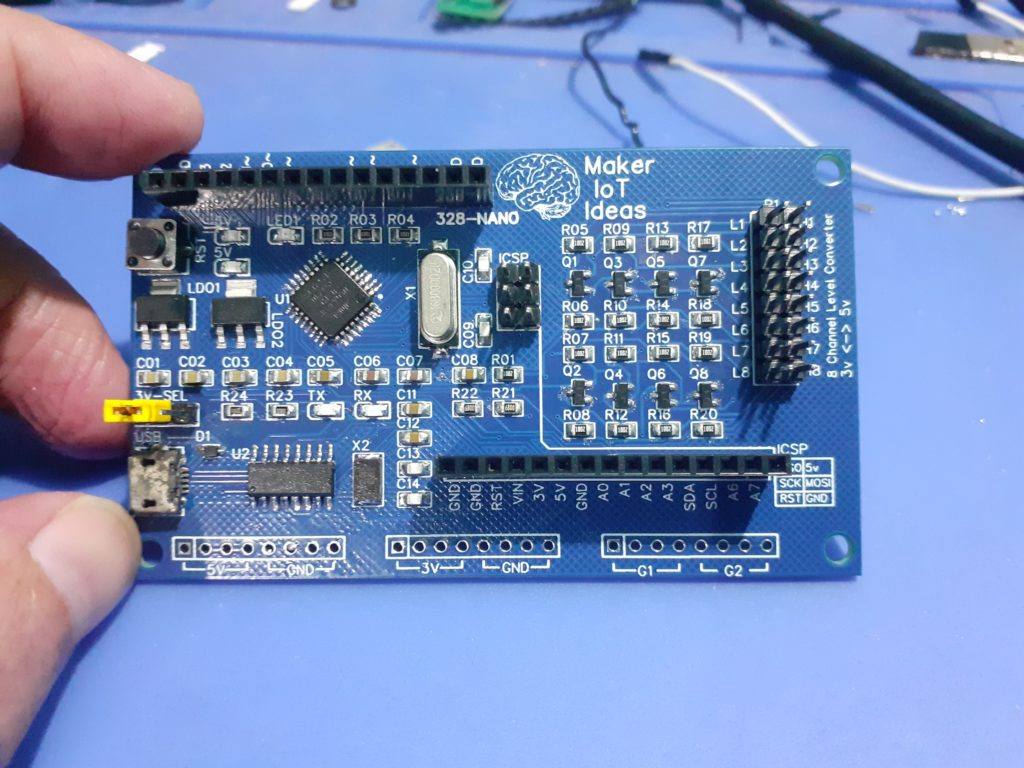
ATMega328P Custom PCB – as a prototype add-on card to the MCU-8266-12E IoT controller
a Quick description of the PCB:
Standard Arduino type headers and pins are provided, with pin labels as for the Arduino Nano. This gives us:
ATMega 328P MCU running at 16Mhz 12 Digital IO (D2 to D13) [ 14 if we use D1 and D2 as well ] 8 Analog Inputs (A0 to A7) [ A4 and A5 are used for I2C ] ICSP header for uploading code USB Port with CH340G for Arduino style serial flashing [This will be removed on the next version] A Dedicated LDO 3.3v Voltage regulator, with a selectable input source (5v from USB, or directly from VIN – for high current use applications – MAX of 800mA)
An 8 Channel Bi-Directional Logic Level Converter, for now, the converter is fixed at bi-directional 3v to 5v conversion. Additional 5v (x4), 3v (x4) and Ground pins (x8), as well as 2 general use bus connections (G1, G2) which I added for use with I2C
Led’s are provided on 5v, 3v, Serial Rx, Tx, as well as on pin D13.
Dimensions: 86mm x 51mm
Assembly – During Reflow on a hotplate.During Reflow
Manufacturing the PCB
This PCB was manufactured at PCBWAY. The Gerber files and BOM, as well as all the schematics, will soon be available as a shared project on their website. If you would like to have PCBWAY manufacture one of your own, designs, or even this particular PCB, you need to do the following… 1) Click on this link 2) Create an account if you have not already got one of your own. If you use the link above, you will also instantly receive a $5USD coupon, which you can use on your first or any other order later. (Disclaimer: I will earn a small referral fee from PCBWay. This referral fee will not affect the cost of your order, nor will you pay any part thereof.) 3) Once you have gone to their website, and created an account, or login with your existing account,
4) Click on PCB Instant Quote
5) If you do not have any very special requirements for your PCB, click on Quick-order PCB
6) Click on Add Gerber File, and select your Gerber file(s) from your computer. Most of your PCB details will now be automatically selected, leaving you to only select the solder mask and silk-screen colour, as well as to remove the order number or not. You can of course fine-tune everything exactly as you want as well.
7) You can also select whether you want an SMD stencil, or have the board assembled after manufacturing. Please note that the assembly service, as well as the cost of your components, ARE NOT included in the initial quoted price. ( The quote will update depending on what options you select ).
8) When you are happy with the options that you have selected, you can click on the Save to Cart Button. From here on, you can go to the top of the screen, click on Cart, make any payment(s) or use any coupons that you have in your account.
Then just sit back and wait for your new PCB to be delivered to your door via the shipping company that you have selected during checkout.
Conclusion
In conclusion, the PCB works quite well, with no issues with flashing the ATMEGA328P with an ICSP programmer from the Arduino IDE, as well as via USB from the Arduino IDE.
The level converter works as expected, successfully translating bidirectional signals on I2C and SPI to and from 3v and 5v devices.
In the next stage, we will focus on the stock APE protocol sketch, as provided by ESPHome, and then, once that is working perfectly, modify it to suit our needs.
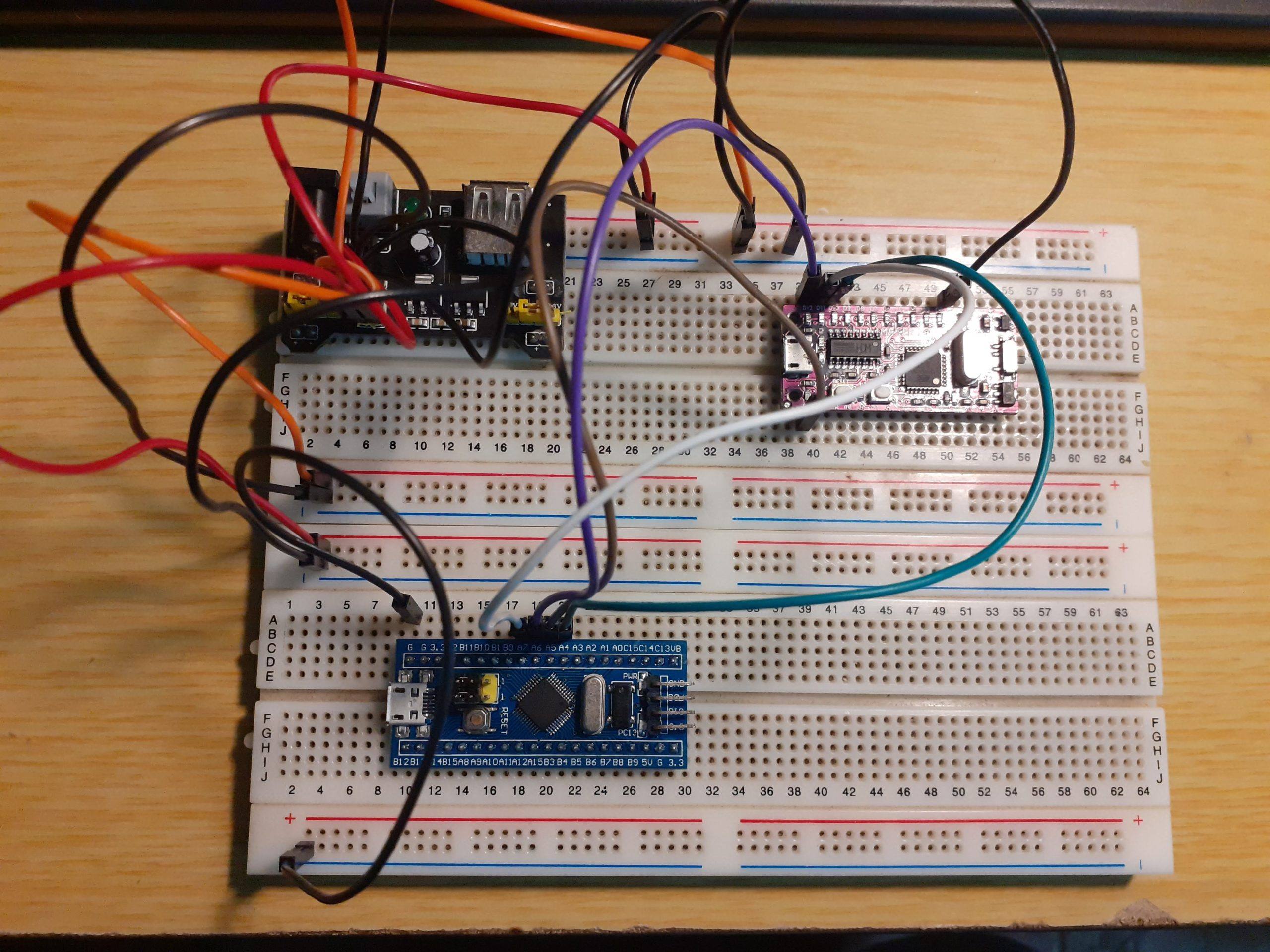
Sometimes it is necessary to send data between two microprocessors. The SPI bus is a very fast serial data-bus that is normally used to interface with various peripherals like OLED Screens, Radios and various sensors. In today’s very short post, I will show you how to interface the STM32F103C8T6 “Blue Pill” with an Arduino Nano to send bidirectional data via the SPI Interface between the two microprocessors. You will need the following to experiment with this by yourself.
1) An STM32F103C8T6 ” Blue Pill” 2) An Arduino Compatible or Original Uno or Nano 3) Two Breadboards 4) Some Linkup wires (at least 4 male-to-male DuPont wires)
Let us look at the pin configuration on the two boards
PIN NAME
“Blue Pill”
Arduino Nano or Uno
MOSI
PA7
D11
MISO
PA6
D12
SCK
PA5
D13
SS
PA4
D10
Connections for the “Blue Pill” are shown above
Connections for Maker NANO are shown above
You can now type in the code for the Master ( The Blue Pill ) into your Arduino IDE
#include<SPI.h>
// Define Constants and Variables
#define SS PA4
#define led PC13
unsigned char MasterSend;;
unsigned char MasterReceive;
void setup() {
pinMode(led,OUTPUT);
Serial.begin(115200);
// SPI Init
SPI.begin();
SPI.setClockDivider(SPI_CLOCK_DIV16);
digitalWrite(SS,HIGH); // set as master
MasterSend = 0xFF;
}
void loop() {
Serial.print(“Sent to Slave “);
Serial.print(” [0x”);
Serial.println(MasterSend,HEX);
MasterReceive = SPI.transfer(MasterSend);
Serial.print(“Received from Slave “);
Serial.print(” [0x”);
Serial.print(MasterReceive,HEX);
Serial.println(“]”);
digitalWrite(led,!digitalRead(led));
delay(200);
}
And in ANOTHER INSTANCE of the Arduino IDE, the code for the SLAVE (Maker NANO)
//SPI Slave Code for Arduino
//SPI Communication between STM32F103C8 & Arduino
#include<SPI.h>
volatile boolean received;
volatile unsigned char SlaveReceived;
volatile unsigned char SlaveSend;
void setup()
{
Serial.begin(115200);
pinMode(MISO,OUTPUT);
SPCR |= _BV(SPE);
received = false;
SPI.attachInterrupt();
SlaveSend = 0xAA;
}
ISR(SPI_STC_vect)
{
SlaveReceived = SPDR;
received = true;
}
void loop() {
Serial.print(“Received from Master”);
Serial.print(” [0x”);
Serial.print(SlaveReceived,HEX);
Serial.println(“] “);
SPDR = SlaveSend;
Serial.print(“Sent to Master”);
Serial.print(” [0x”);
Serial.print(SlaveSend,HEX);
Serial.println(“]”);
delay(200);
}
Upload the code to the boards, and open the serial monitors on both instances of the Arduino IDE. Set the Baud Rate to 115200 You will see that the Master sends a byte to the Slave, and the Save replies with a byte of it’s own.
Master sends data to Slave, Receives Data Back
Slave received data from Master, and replies with data of its own
This sketch can now very easily be modified to send reading from sensors, or instructions to control other peripherals between the two microprocessors. It is limited only by your imagination, and your ability to code.
The Serial Peripheral Interface is a synchronous serial communication interface for short-distance communication, it is typically used in embedded systems. The interface was developed by Motorola in the mid 1980’s and has become a very popular standard.
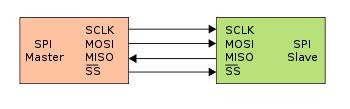
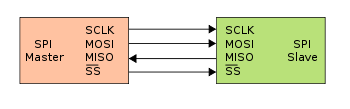
It is used with many kinds of sensors, LCD’s and also SD-Cards. SPI operates in a Master-Slave model, with a possibility of multiple slave devices, each selected in turn by a SS (slave select) or CS (chip select) pin that is usually pulled low by the master.
Typical connection between two SPI devices
Typical configuration
SPI is a four-wire interface, with the different lines being – MOSI [Master Out Slave In] -MISO [Master In Slave Out] -SCLK [Serial Clock OUT – generated by the master] -SS/CS [Slave Select or Chip Select, sometimes also labelled CE – Chip Enable]
SPI is a FULL DUPLEX interface, where the master initiates the communication frames between the various slave devices. This is usually done by pulling the particular device’s SS/CS pin low. Data is then shifted simultaneously into and out of the devices by means of the MOSI and MISO lines on the bus. The frequency of the serially shifted data is controlled by the SCLK line. This clock signal is generated by the master device.
It is important to note that MOST of the slave devices have a tri-state (HIGH IMPEDANCE) mode on their MISO pins. This electrically disconnects the MISO pin from the bus when the device is not selected via the SS/CS pin.
You should also note the SPI slave devices that do not have a tri-state mode on their MISO pins, should not be used on the same bus as devices that have without using an external tri-state buffer circuit between the non-tristate device and the rest of the devices on the MISO bus.
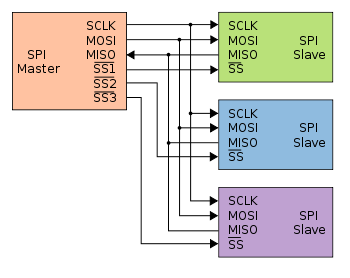
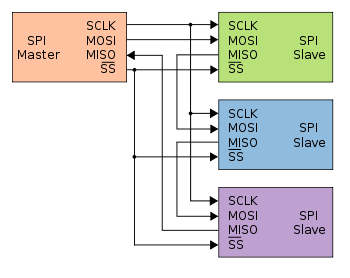
Typical connection between an SPI Master and three Slave devices
It is possible to connect multiple SPI slave devices to on Master device if you remember that each slave device will need its own dedicated SS/CS pin on the master. This can however quickly use a lot of IO pins on a microcontroller, thus being one of the disadvantages of SPI versus I2C. SPI is however quite a bit faster than I2C.
Data Transmission
To begin communication, the bus master configures the clock, using a frequency supported by the slave device, typically up to a few MHz. The master then selects the slave device with a logic level 0 on the select line. If a waiting period is required, such as for an analog-to-digital conversion, the master must wait for at least that period of time before issuing clock cycles.
During each SPI clock cycle, full-duplex data transmission occurs. The master sends a bit on the MOSI line and the slave reads it, while the slave sends a bit on the MISO line and the master reads it. This sequence is maintained even when only one-directional data transfer is intended.
A typical hardware setup using two shift registers to form an inter-chip circular buffer
Transmissions normally involve two shift registers of some given word-size, such as eight bits, one in the master and one in the slave; they are connected in a virtual ring topology. Data is usually shifted out with the most significant bit first. On the clock edge, both master and slave shift out a bit and output it on the transmission line to the counterpart. On the next clock edge, at each receiver the bit is sampled from the transmission line and set as a new least-significant bit of the shift register. After the register bits have been shifted out and in, the master and slave have exchanged register values. If more data needs to be exchanged, the shift registers are reloaded and the process repeats. Transmission may continue for any number of clock cycles. When complete, the master stops toggling the clock signal, and typically deselects the slave.
Transmissions often consist of eight-bit words. However, other word-sizes are also common, for example, sixteen-bit words for touch-screen controllers or audio codecs, such as the TSC2101 by Texas Instruments, or twelve-bit words for many digital-to-analogue or analogue-to-digital converters.
Every slave on the bus that has not been activated using its chip select line must disregard the input clock and MOSI signals and should not drive MISO (I.E. must have a tri-state output) although some devices need external tri-state buffers to implement this.
Clock polarity and phasing
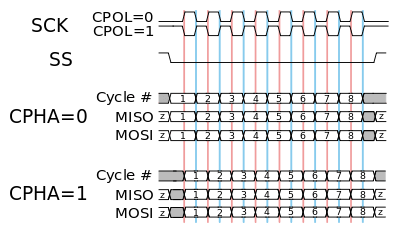
In addition to setting the clock frequency, the master must also configure the clock polarity and phase with respect to the data. Motorola SPI Block Guide names these two options as CPOL and CPHA (for clock polarity and phase) respectively, a convention most vendors have also adopted.
The timing diagram is shown below. The timing is further described below and applies to both the master and the slave device.
CPOL determines the polarity of the clock. The polarities can be converted with a simple inverter.
CPOL=0 is a clock which idles at 0, and each cycle consists of a pulse of 1. That is, the leading edge is a rising edge, and the trailing edge is a falling edge.
CPOL=1 is a clock which idles at 1, and each cycle consists of a pulse of 0. That is, the leading edge is a falling edge, and the trailing edge is a rising edge.
CPHA determines the timing (i.e. phase) of the data bits relative to the clock pulses. Conversion between these two forms is non-trivial.
For CPHA=0, the “out” side changes the data on the trailing edge of the preceding clock cycle, while the “in” side captures the data on (or shortly after) the leading edge of the clock cycle. The out-side holds the data valid until the trailing edge of the current clock cycle. For the first cycle, the first bit must be on the MOSI line before the leading clock edge.
An alternative way of considering it is to say that a CPHA=0 cycle consists of a half cycle with the clock idle, followed by a half cycle with the clock asserted.
For CPHA=1, the “out” side changes the data on the leading edge of the current clock cycle, while the “in” side captures the data on (or shortly after) the trailing edge of the clock cycle. The out-side holds the data valid until the leading edge of the following clock cycle. For the last cycle, the slave holds the MISO line valid until slave select is de-selected.
An alternative way of considering it is to say that a CPHA=1 cycle consists of a half cycle with the clock asserted, followed by a half cycle with the clock idle.
A timing diagram showing clock polarity and phase. Red lines denote clock leading edges, and blue lines, trailing edges.
The MOSI and MISO signals are usually stable (at their reception points) for the half cycle until the next clock transition. SPI master and slave devices may well sample data at different points in that half cycle.
This adds more flexibility to the communication channel between the master and slave.
Mode numbers
The combinations of polarity and phases are often referred to as modes which are commonly numbered according to the following convention, with CPOL as the high order bit and CPHA as the low order bit:
For “Microchip PIC” / “ARM-based” microcontrollers (note that NCPHA is the inversion of CPHA):
SPI mode
Clock polarity (CPOL/CKP)
Clock phase (CPHA)
Clock edge (CKE/NCPHA)
0
0
0
1
1
0
1
0
2
1
0
1
3
1
1
0
For PIC32MX: SPI mode configure CKP, CKE and SMP bits. Set SMP bit and CKP, CKE two bits configured as above table.
Mode
CPOL
CPHA
0
0
0
1
0
1
2
1
0
3
1
1
For other microcontrollers:
Another commonly used notation represents the mode as a (CPOL, CPHA) tuple; e.g., the value ‘(0, 1)’ would indicate CPOL=0 and CPHA=1.
Note that in Full Duplex operation, the Master device could transmit and receive with different modes. For instance, it could transmit in Mode 0 and be receiving in Mode 1 at the same time.
Independent Slave Configuration
In the independent slave configuration, there is an independent chip select line for each slave. This is the way SPI is normally used. The master asserts only one chip select at a time.
Pull-up resistors between the power source and chip select lines are recommended for systems where the master’s chip select pins may default to an undefined state. When separate software routines initialize each chip select and communicate with its slave, pull-up resistors prevent other uninitialized slaves from responding.
Since the MISO pins of the slaves are connected together, they are required to be tri-state pins (high, low or high-impedance), where the high-impedance output must be applied when the slave is not selected. Slave devices not supporting tri-state may be used in independent slave configuration by adding a tri-state buffer chip controlled by the chip select signal. (Since only a single signal line needs to be tri-stated per slave, one typical standard logic chip that contains four tristate buffers with independent gate inputs can be used to interface up to four slave devices to an SPI bus.)
Typical SPI configuration
Daisy chain configuration
Some products that implement SPI may be connected in a daisy chain configuration, the first slave output being connected to the second slave input, etc. The SPI port of each slave is designed to send out during the second group of clock pulses an exact copy of the data it received during the first group of clock pulses. The whole chain acts as a communication shift register; daisy chaining is often done with shift registers to provide a bank of inputs or outputs through SPI. Each slave copies input to output in the next clock cycle until the active low SS line goes high. Such a feature only requires a single SS line from the master, rather than a separate SS line for each slave.
Note that not all SPI devices support this. You should thus check your datasheet before using this configuration!
SPI Daisy Chain configuration
Valid Communications
Some slave devices are designed to ignore any SPI communications in which the number of clock pulses is greater than specified. Others do not care, ignoring extra inputs and continuing to shift the same output bit. It is common for different devices to use SPI communications with different lengths, as, for example, when SPI is used to access the scan chain of a digital IC by issuing a command word of one size (perhaps 32 bits) and then getting a response of a different size (perhaps 153 bits, one for each pin in that scan chain).
Interrupts
SPI devices sometimes use another signal line to send an interrupt signal to a host CPU. Examples include pen-down interrupts from touchscreen sensors, thermal limit alerts from temperature sensors, alarms issued by real-time clock chips, SDIO, and headset jack insertions from the sound codec in a cell phone. Interrupts are not covered by the SPI standard; their usage is neither forbidden nor specified by the standard. In other words, interrupts are outside the scope of the SPI standard and are optionally implemented independently from it.
Bit Banging a SPI Master – Example code
Below is an example of bit-banging the SPI protocol as an SPI master with CPOL=0, CPHA=0, and eight bits per transfer. The example is written in the C programming language. Because this is CPOL=0 the clock must be pulled low before the chip select is activated. The chip select line must be activated, which normally means being toggled low, for the peripheral before the start of the transfer, and then deactivated afterwards. Most peripherals allow or require several transfers while the select line is low; this routine might be called several times before deselecting the chip.
/*
* Simultaneously transmit and receive a byte on the SPI.
*
* Polarity and phase are assumed to be both 0, i.e.:
* - input data is captured on rising edge of SCLK.
* - output data is propagated on falling edge of SCLK.
*
* Returns the received byte.
*/
uint8_t SPI_transfer_byte(uint8_t byte_out)
{
uint8_t byte_in = 0;
uint8_t bit;
for (bit = 0x80; bit; bit >>= 1) {
/* Shift-out a bit to the MOSI line */
write_MOSI((byte_out & bit) ? HIGH : LOW);
/* Delay for at least the peer's setup time */
delay(SPI_SCLK_LOW_TIME);
/* Pull the clock line high */
write_SCLK(HIGH);
/* Shift-in a bit from the MISO line */
if (read_MISO() == HIGH)
byte_in |= bit;
/* Delay for at least the peer's hold time */
delay(SPI_SCLK_HIGH_TIME);
/* Pull the clock line low */
write_SCLK(LOW);
}
return byte_in;
}
This concludes part 1 of my series on SPI. I hope you found it interesting and useful.