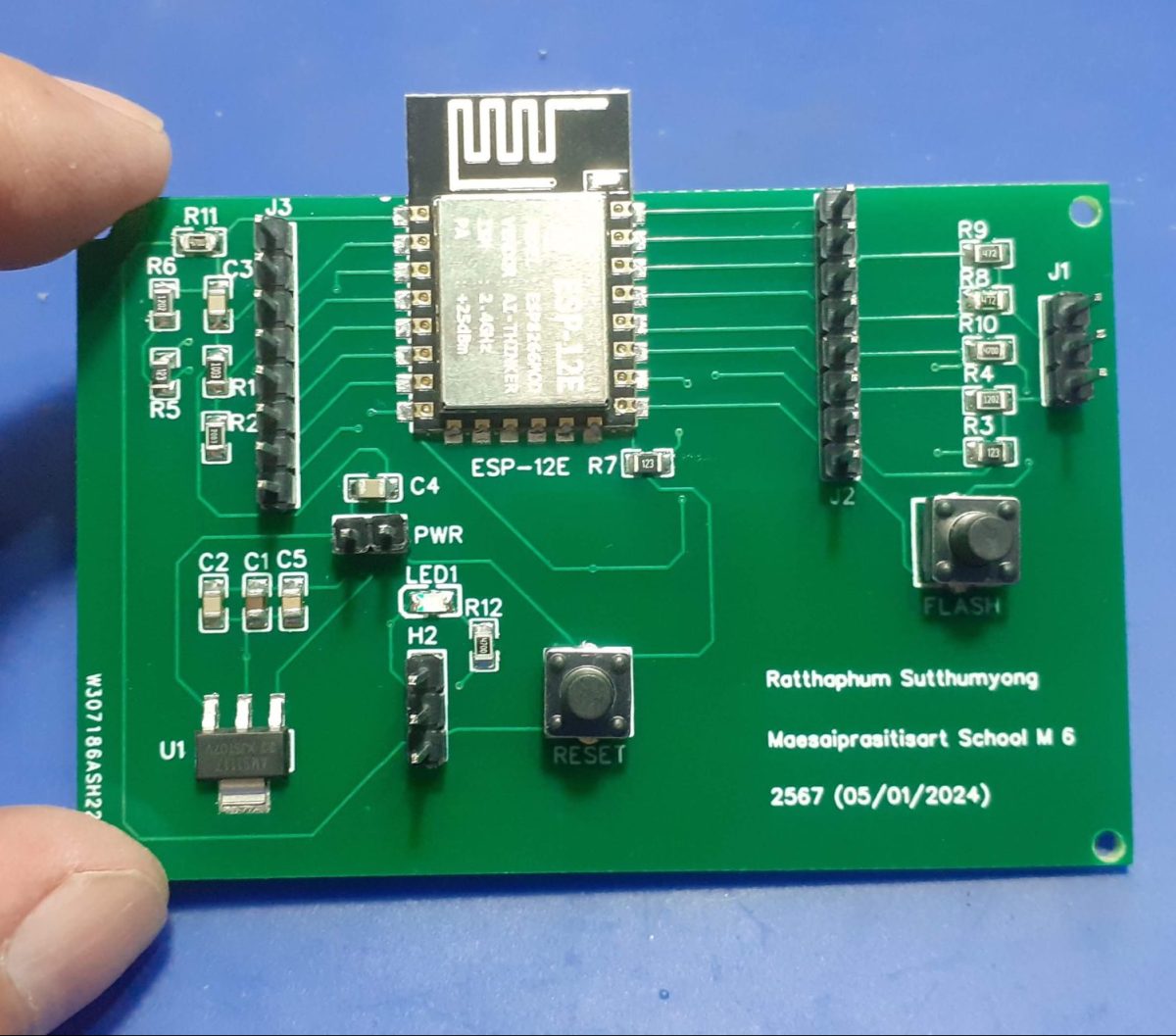
This is a student-designed ESP8266 Dev board. This project came along after I challenged some final-year students at our local high school to try to design their own PCBs. They had recently assisted me in a collaboration with the Mushroom House Controller project, and while we were talking about electronics, the idea of a challenge came up, to stimulate some interaction.
One of them was extremely confident that he could do it, providing that I gave him a schematic. I complied, and he spent the next week hacking away on the EDA software. When i saw him again, he very proudly handed me a USB flash drive, containing the EDA design, but no schematic! Oh well, let us take a chance and see what happens… I mean, how bad could it be…
I took a good look at the design, making sure that it was at least electrically sound, with all the connections made to the right components, in the right way.
That part all passed, but, as we can clearly see, the layout could be very much improved. I decided to NOT change anything on the PCB, to keep the work original.
Manufacturing the PCB
The PCB, together with a stencil, arrived from PCBWay on about the 15th of this month.
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to who will do his/her best to resolve your issue as soon as possible.
Technically, this PCB does not actually need it, as the components are large enough to manually place solder paste. This being a student project, I did however choose to get the stencil to try and assure the best possible chance of success..
Placing components only took a few minutes, after which the PCB was reflowed with hot air – no need for a hotplate here!
Through-hole components took only another few minutes to solder into place, and then testing could commence.
My thoughts – a very “gentle” critique
The board could be smaller, but due to the fact that this is a “very first PCB ever” and also a first SMD PCB at that, I can understand that it may still be quite difficult to understand how small the components really are, as well as lay them out properly.
Components are mostly all over the board, without a clear “group by function” kind of mindset. This once again comes back to experience.
GPIO pins are not notated. This will really make the board difficult to use. The power supply input is in the center of the PCB. This is definitely not ideal.
In general, track sizes could have been bigger, especially on the Power and Ground lines. No ground plane was poured on either layer.
So does it work? Yes, surprisingly it does. We shall see more of it in the near future, when I task the creator with using it to perform some task. That way, he can experience first hand the difficulties of the design, and also learn practically why certain things need to be improved.
This is a Simple IoT Plant Watering Solution, done as another collaboration with the local High School in my Area. In this project, they took a group of purely academic students ( Language majors ) and told them that they had to design an electronics project that would have use in the real world…
This presented a very tough situation to the students since they had never even imagined that they could do something like this… (Think along the lines of a Senior Design project, like what you would give EE Students during their final year – with all the documentation, pamphlets, and explanations – i.e. lots and lots of paperwork) , and then also add on the requirement that they had to present a practical project as well! And they have only 45 days to do that as well!
I came into this picture late on a Thursday or Friday afternoon, with a group of students milling around outside the Electronics lab. They were unknown to me and seemed quite flustered… I invited them in, and eventually, they started opening up about their problem…
As it turned out, they were completely clueless, and did not know where to start with anything, not even what they wanted to do! Their initial idea went like “something that uses a camera to sort garbage by type and material” – that was never going to happen, not in 45 days, and not with the allocated budget of no more than $USD30.00 they were allowed. Lets not even go to the machine learning stuff, training of the models etc…
So, I took over, and decided that we shall do a simple IoT Plant Watering Solution. It is complex enough for Grade 11 students, and more importantly, I knew that I could teach them enough Arduino coding and basic electronics skills in the time allotted to get the project completed successfully.
What followed was a few very intensive sessions after school to get the paperwork sorted. For some reason, their teacher required ALL paperwork be completed upfront, with the entire design and code prepared before they touched the practical stuff – A funny way to design stuff if you ask me, but that is how we did it…
We settled on the ESP8266 12-E NodeMCU v3 development board, A resistive soil sensor, a DHT11 for temperature and humidity data, a small OLED I2C display and a small 5v USB-powered water pump. While they ordered the components, we started with basic coding classes, and this is where the story changes.
These kids blew me away with their level of interest, their attitude to learning, and how quickly they grasped the concepts. In no time at all, they were coding basic sketches, taking readings, learning how the different sensors worked, and pushing the envelope by adding lots more complementary components like MOSFETs and BJT transistors.
With this level of enthusiasm, I could not help but also become very excited, and thus decided to go a bit further than usual and help them design a neat PCB baseboard for the NodeMCU. That way, we could get rid of all those pesky wire connections, and maybe even produce something that looked good.
This is what we came up with, here shown just after SMD component placing. They ( the students ) did all of that by themselves as well, and it turned out to be a lot of fun for them, with some funny moments for me as well.
The Assembly ( First time ever )
The PCB, together with a stencil, arrived from PCBWay on about the 15th of this month.
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to who will do his/her best to resolve your issue as soon as possible.
This caused quite a lot of excitement from the students since they asked me to get to school immediately, and offered to stay after school to get the assembly done. So, I packed up all the components required, got in the car, and a few minutes later, we had an assembly line running 🙂
It took them only a few minutes to understand how to read the BOM file, use that information to find the right components and take turns to place a few components at a time onto the PCB. ( I did the solder paste and stencil thing on my own, as that could potentially turn out to be a very messy and wasteful operation if I let them do it )
During this assembly, they were quite amazed at what they were doing, but also quite confused as to how we would ” make the components stick to the PCB later”. They have seen soldering on YouTube, and could not understand how this “grey paste” could “turn hard and shiny” – with some even trying to rush their friends, as the paste would dry up and become sticky…
That signalled to me that we should get the hot air ready, and show them properly, as it would stop the speculation, and give them closure on their questions, because no matter how much I tried to explain that the solder paste would be melted later, they could not understand that concept.
Once I reflowed the first few components using hot air, they all once again took turns with a small group of components on the PCB ( We assembled 2 PCB’s to make sure everybody got a chance to try everything)
Through-hole soldering of the various header pins and other components was next. Once again, I showed them an example and then stepped back while they took over and completed the task. At this time it was about 17:30 already, so I sent them all home, with a promise to return the next day and complete the rest of the build.
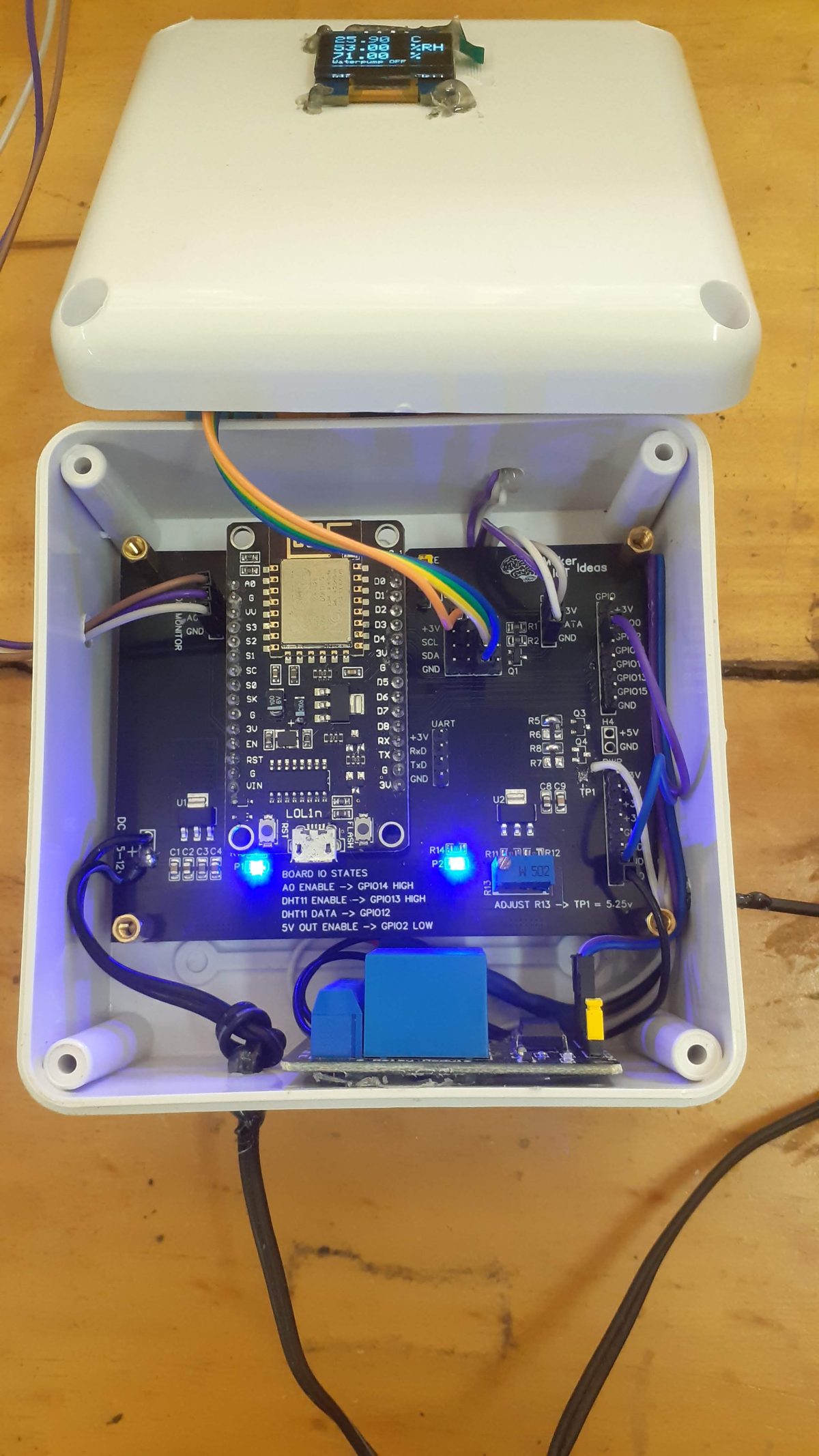
Final Assembly and the Enclosure
We added some copper standoffs to the bottom of the enclosure, drilled some holes and mounted everything with screws and hot glue. The some final testing was performed, and the project was placed outside, next to a potted plant, and put on a sort of soak test, to verify operation for a few days.
A discussion of the circuit
In this circuit, I made use of a very cheap resistive soil moisture probe sensor. It consists of an etched PCB probe and a separate OPAMP on an additional PCB. This assembly then sends an analog voltage back to the Microprocessor for analysis. Very easy to use, and as mentioned, extremely cheap! But this is also a big problem. As seen in many other posts online, people don’t like these probes, as they don’t seem to last very long, and/or become unreliable over time.
I believe that this is due to the fact that they run them continuously, and that, causes the electrodes to erode away over time – because the thing about it, you are basically running an electrolysis cell – sending voltage/current through a probe, that is suspended in a conductive medium ( the water in the soil contains minerals etc – that is why it is conductive, and why we can get a reading from it )
How do I plan to avoid this problem then? The probe is powered through a small N-Channel MOSFET. This allows us to power the probe on when we want a reading, and then power it off again. It will definitely not completely stop the electrodes eroding away over time, but I am sure it will extend the usable lifetime of the probe by quite a bit. On the downside, you need another GPIO pin to control that MOSFET, but that in itself is also a great learning opportunity
This project was extremely interesting. It was something very basic, but it gave me a very unique opportunity to teach a group of kids something they never knew before. It also initiated a spark in many of them, who are now interested in getting involved in electronics as a hobby. The possibilities of this project, if it is improved a bit more, could also be great. For example, we did not even consider adding IoT connectivity to this yet, we all decided that it was not needed, and an unnecessary complication of an already complex issue ( to the students that is). I shall keep monitoring the operation of the device over the next few weeks, and hopefully get some answers myself as to how long that soil probe will last… As a control, we have another one that was left powered on in the same container. That one are not being used to take readings, but will definitely provide us with a good comparison against the probe that is only on then used…
Over the last few months, We have been steadily improving the design of our XIAO RP2040-based mouse device. With this, ver 3.0 all the hardware bugs were finally eliminated, and we also placed the device into its first-ever enclosure.
Let us take a look at the design
The PCB and Schematic
The PCB is a very strange shape, with lots of cut-outs. This is to accommodate the big push buttons that will be mounted in the enclosure, as well as to fit nicely into the mounting area of the enclosure… This design took quite some time with a pair of callipers and CAD, but all went well, and the shape is perfectly accurate.
The schematic is also straight forward, with the only real changes begin to the rotary encoder. In ver 2.0, We connected the encoder to the MCP23008, but for some reason CircuitPython does not seem to like an encoder connected to an IO extender… That forced us to do some software hack to use the encoder… I have thus decided to change things around in ver 3.0 and move the encoder back to the native GPIO on the XIAO RP2040
It is also interesting to note that the circuit was initially designed for the XIAO ESP32S3, but due to issues with stock, as well as crazy prices on local parts, we made a quick turn-around and went back to the RP2040. The ESP32S3 was going to allow us to implement a wireless device, through using ESPNow protocol… That may still be done in future, but for now, I think we have done enough work on the mouse device for the time being…
Manufacturing the PCB and Assembly
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to who will do his/her best to resolve your issue as soon as possible.
Assembly was quite easy, I chose to use a stencil, because the IO Expander chip has a very tiny footprint, as well as a leadless package… The stencil definitely helps prevent excessive solder paste, as well as saves a lot of time on reworking later…
In the picture above, we can clearly see why I had to design the PCB with such an irregular shape.
Firmware and Coding
We are still using CircuitPython for the firmware on this device. It is not perfect, but it works, well sort of anyway. What does that mean? Well… As far as the mouse functions are concerned, clicking, scrolling, moving the pointer – all of that is works perfectly, and thus allows me to use the device for basic operations every day. Drag and Drop, as well as selecting and or highlighting text DOES NOT work. This seem to be an issue with the HID code in Circuitpython, meaning it doesn’t seem to be implemented. It is also way beyond my abilities to implement it myself…
Below is the code.py file, with the boot.py below that