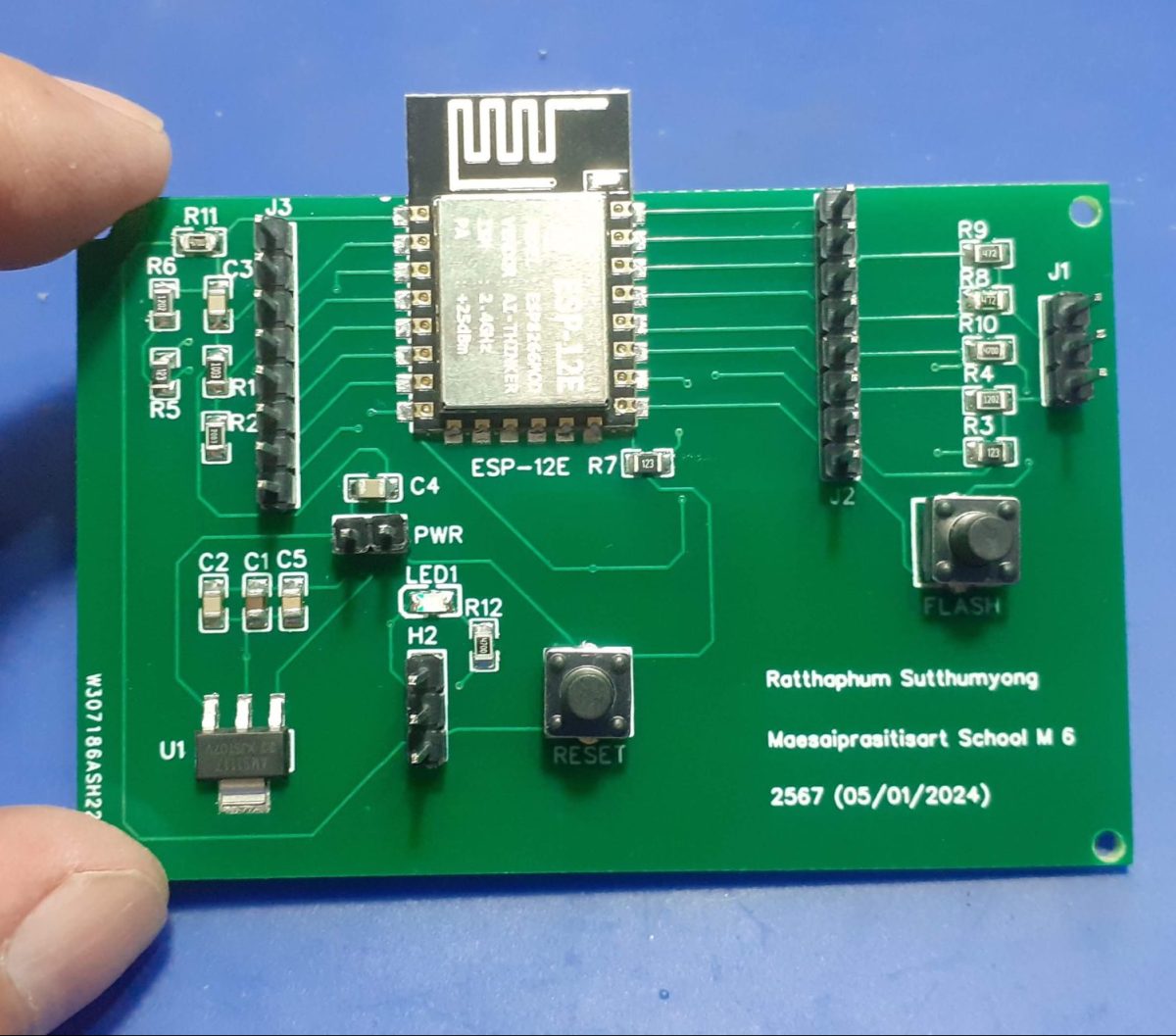
This is a student-designed ESP8266 Dev board. This project came along after I challenged some final-year students at our local high school to try to design their own PCBs. They had recently assisted me in a collaboration with the Mushroom House Controller project, and while we were talking about electronics, the idea of a challenge came up, to stimulate some interaction.
One of them was extremely confident that he could do it, providing that I gave him a schematic. I complied, and he spent the next week hacking away on the EDA software. When i saw him again, he very proudly handed me a USB flash drive, containing the EDA design, but no schematic! Oh well, let us take a chance and see what happens… I mean, how bad could it be…
I took a good look at the design, making sure that it was at least electrically sound, with all the connections made to the right components, in the right way.
That part all passed, but, as we can clearly see, the layout could be very much improved. I decided to NOT change anything on the PCB, to keep the work original.
Manufacturing the PCB
The PCB, together with a stencil, arrived from PCBWay on about the 15th of this month.
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to who will do his/her best to resolve your issue as soon as possible.
Technically, this PCB does not actually need it, as the components are large enough to manually place solder paste. This being a student project, I did however choose to get the stencil to try and assure the best possible chance of success..
Placing components only took a few minutes, after which the PCB was reflowed with hot air – no need for a hotplate here!
Through-hole components took only another few minutes to solder into place, and then testing could commence.
My thoughts – a very “gentle” critique
The board could be smaller, but due to the fact that this is a “very first PCB ever” and also a first SMD PCB at that, I can understand that it may still be quite difficult to understand how small the components really are, as well as lay them out properly.
Components are mostly all over the board, without a clear “group by function” kind of mindset. This once again comes back to experience.
GPIO pins are not notated. This will really make the board difficult to use. The power supply input is in the center of the PCB. This is definitely not ideal.
In general, track sizes could have been bigger, especially on the Power and Ground lines. No ground plane was poured on either layer.
So does it work? Yes, surprisingly it does. We shall see more of it in the near future, when I task the creator with using it to perform some task. That way, he can experience first hand the difficulties of the design, and also learn practically why certain things need to be improved.
This is a Simple IoT Plant Watering Solution, done as another collaboration with the local High School in my Area. In this project, they took a group of purely academic students ( Language majors ) and told them that they had to design an electronics project that would have use in the real world…
This presented a very tough situation to the students since they had never even imagined that they could do something like this… (Think along the lines of a Senior Design project, like what you would give EE Students during their final year – with all the documentation, pamphlets, and explanations – i.e. lots and lots of paperwork) , and then also add on the requirement that they had to present a practical project as well! And they have only 45 days to do that as well!
I came into this picture late on a Thursday or Friday afternoon, with a group of students milling around outside the Electronics lab. They were unknown to me and seemed quite flustered… I invited them in, and eventually, they started opening up about their problem…
As it turned out, they were completely clueless, and did not know where to start with anything, not even what they wanted to do! Their initial idea went like “something that uses a camera to sort garbage by type and material” – that was never going to happen, not in 45 days, and not with the allocated budget of no more than $USD30.00 they were allowed. Lets not even go to the machine learning stuff, training of the models etc…
So, I took over, and decided that we shall do a simple IoT Plant Watering Solution. It is complex enough for Grade 11 students, and more importantly, I knew that I could teach them enough Arduino coding and basic electronics skills in the time allotted to get the project completed successfully.
What followed was a few very intensive sessions after school to get the paperwork sorted. For some reason, their teacher required ALL paperwork be completed upfront, with the entire design and code prepared before they touched the practical stuff – A funny way to design stuff if you ask me, but that is how we did it…
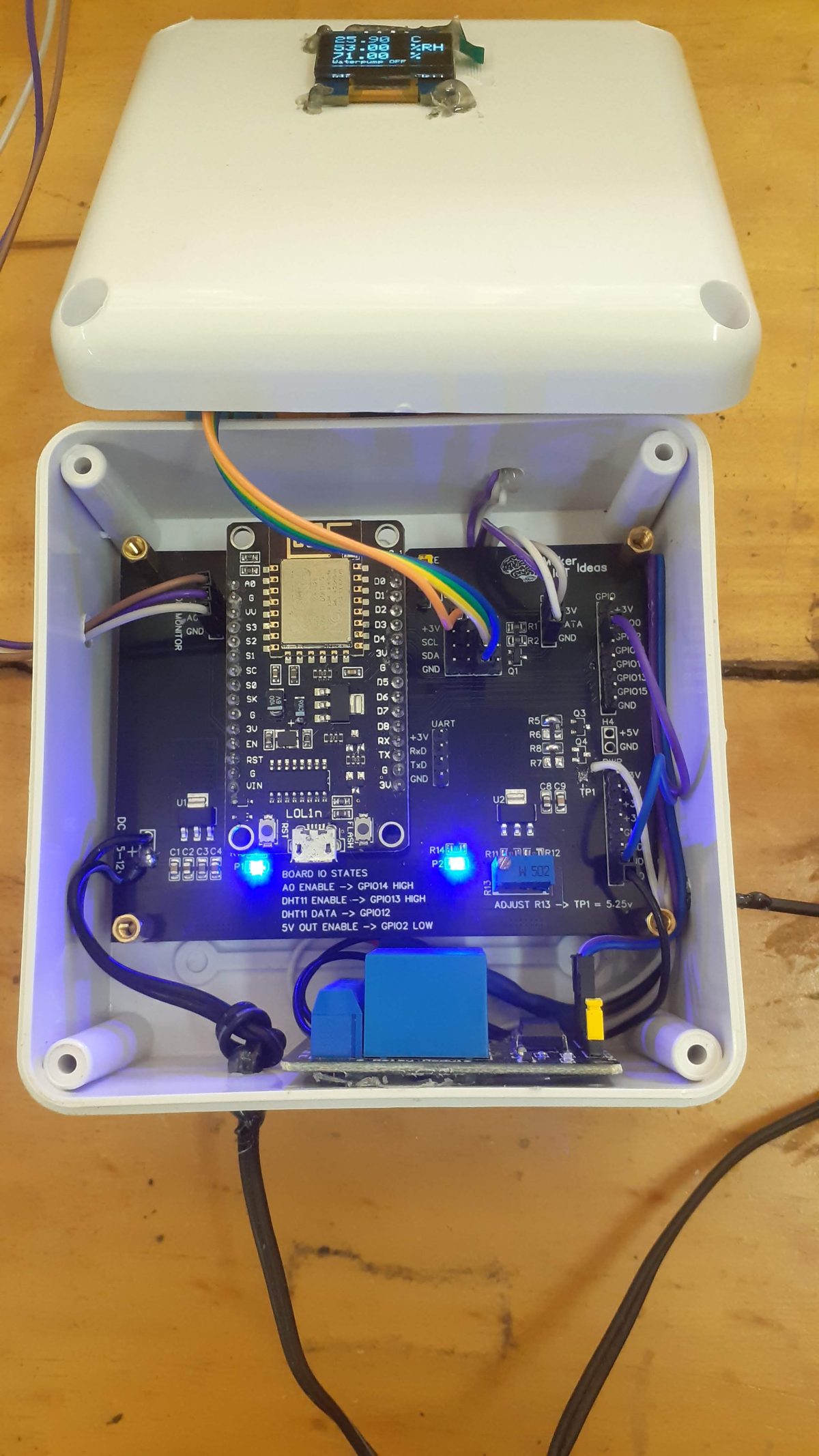
We settled on the ESP8266 12-E NodeMCU v3 development board, A resistive soil sensor, a DHT11 for temperature and humidity data, a small OLED I2C display and a small 5v USB-powered water pump. While they ordered the components, we started with basic coding classes, and this is where the story changes.
These kids blew me away with their level of interest, their attitude to learning, and how quickly they grasped the concepts. In no time at all, they were coding basic sketches, taking readings, learning how the different sensors worked, and pushing the envelope by adding lots more complementary components like MOSFETs and BJT transistors.
With this level of enthusiasm, I could not help but also become very excited, and thus decided to go a bit further than usual and help them design a neat PCB baseboard for the NodeMCU. That way, we could get rid of all those pesky wire connections, and maybe even produce something that looked good.
This is what we came up with, here shown just after SMD component placing. They ( the students ) did all of that by themselves as well, and it turned out to be a lot of fun for them, with some funny moments for me as well.
The Assembly ( First time ever )
The PCB, together with a stencil, arrived from PCBWay on about the 15th of this month.
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to who will do his/her best to resolve your issue as soon as possible.
This caused quite a lot of excitement from the students since they asked me to get to school immediately, and offered to stay after school to get the assembly done. So, I packed up all the components required, got in the car, and a few minutes later, we had an assembly line running 🙂
It took them only a few minutes to understand how to read the BOM file, use that information to find the right components and take turns to place a few components at a time onto the PCB. ( I did the solder paste and stencil thing on my own, as that could potentially turn out to be a very messy and wasteful operation if I let them do it )
During this assembly, they were quite amazed at what they were doing, but also quite confused as to how we would ” make the components stick to the PCB later”. They have seen soldering on YouTube, and could not understand how this “grey paste” could “turn hard and shiny” – with some even trying to rush their friends, as the paste would dry up and become sticky…
That signalled to me that we should get the hot air ready, and show them properly, as it would stop the speculation, and give them closure on their questions, because no matter how much I tried to explain that the solder paste would be melted later, they could not understand that concept.
Once I reflowed the first few components using hot air, they all once again took turns with a small group of components on the PCB ( We assembled 2 PCB’s to make sure everybody got a chance to try everything)
Through-hole soldering of the various header pins and other components was next. Once again, I showed them an example and then stepped back while they took over and completed the task. At this time it was about 17:30 already, so I sent them all home, with a promise to return the next day and complete the rest of the build.
Final Assembly and the Enclosure
We added some copper standoffs to the bottom of the enclosure, drilled some holes and mounted everything with screws and hot glue. The some final testing was performed, and the project was placed outside, next to a potted plant, and put on a sort of soak test, to verify operation for a few days.
A discussion of the circuit
In this circuit, I made use of a very cheap resistive soil moisture probe sensor. It consists of an etched PCB probe and a separate OPAMP on an additional PCB. This assembly then sends an analog voltage back to the Microprocessor for analysis. Very easy to use, and as mentioned, extremely cheap! But this is also a big problem. As seen in many other posts online, people don’t like these probes, as they don’t seem to last very long, and/or become unreliable over time.
I believe that this is due to the fact that they run them continuously, and that, causes the electrodes to erode away over time – because the thing about it, you are basically running an electrolysis cell – sending voltage/current through a probe, that is suspended in a conductive medium ( the water in the soil contains minerals etc – that is why it is conductive, and why we can get a reading from it )
How do I plan to avoid this problem then? The probe is powered through a small N-Channel MOSFET. This allows us to power the probe on when we want a reading, and then power it off again. It will definitely not completely stop the electrodes eroding away over time, but I am sure it will extend the usable lifetime of the probe by quite a bit. On the downside, you need another GPIO pin to control that MOSFET, but that in itself is also a great learning opportunity
This project was extremely interesting. It was something very basic, but it gave me a very unique opportunity to teach a group of kids something they never knew before. It also initiated a spark in many of them, who are now interested in getting involved in electronics as a hobby. The possibilities of this project, if it is improved a bit more, could also be great. For example, we did not even consider adding IoT connectivity to this yet, we all decided that it was not needed, and an unnecessary complication of an already complex issue ( to the students that is). I shall keep monitoring the operation of the device over the next few weeks, and hopefully get some answers myself as to how long that soil probe will last… As a control, we have another one that was left powered on in the same container. That one are not being used to take readings, but will definitely provide us with a good comparison against the probe that is only on then used…
I designed this breakout to assist me during prototyping my next version of the “RP2040 Emergency Mouse“. In that project, I used the SEEED Studio Xiao RP2040, along with a few other components to create a simple but effective computer mouse-type device.
While the “mouse” works quite well, I have quite early on discovered that it could be better. More on that in a follow-up article, but let us just say that I needed more GPIO pins than that were available on the XIAO RP2040 and that the layout can be improved a bit – especially If I want to get it into an enclosure.
I am still quite neutral about CircuitPython and Micropython on microcontrollers, and Python in general, but since the above-mentioned project runs completely on CircuitPython, it made a lot of good sense to get more into it.
What is on the PCB?
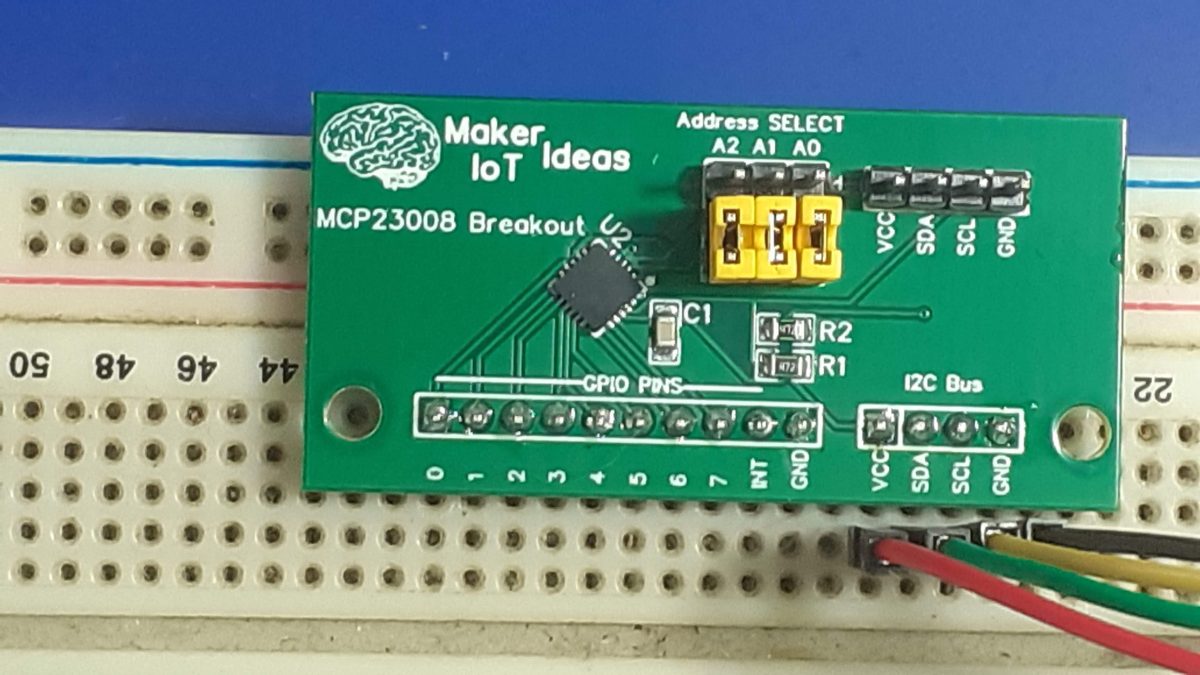
I wanted something as small as possible, and that meant that I chose a QFN package for the MCP23008 IO expander chip. At only 4mm x 4mm, and not being bothered to try and find a DIP version, a breakout board became a much-needed necessity.
Address Selection Jumpers, Two I2C bus headers, and of course the all-important GPIO pins make up all of the user accessible interfacing. Note that the chip reset line is permanently tied to Vcc to make things a bit less cluttered, and easier to use while prototyping.
A decoupling capacitor, as well as pullup resistors on the I2c lines, were also included. Another note here, I did not provide my usual selection jumper to disable these on this particular board.
The Schematic
Manufacturing the PCB
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
Due to the small size of the QFN package, I strongly recommend that you either have this assembled professionally, or at least consider buying a stencil for applying the solder paste to this board. Maybe those with excellent eyesight can do without that?
Assembly took only a few minutes, with the help of an extremely accurate stencil, followed by a few minutes on a hotplate, and manually soldering on the header pins.
Using the MCP23008 with CircuitPython
I2C devices are very easy to use with the Arduino IDE or similar, and as such, I will not be covering that here.
Circuitpython, however, is gaining popularity, and I am slowly starting to see what the hype is about myself…
So, to get started, you need a microcontroller running CircuitPython – See Adafruit for excellent tutorials. You will also need a few libraries from Adafruit See this link
I will give a very simple example below, showing how to set a pin as an output, as well as an input with internal pullup resistors enabled. Note that the MCP23008 DOES NOT SUPPORT pull-down resistors internally. You need to add those by yourself externally.
# Initialising all the required libraries
import board
import busio
from digitalio import Direction
from adafruit_mcp230xx.mcp23008 import MCP23008
i2c = busio.I2C(board.SCL, board.SDA)
# Adding the MCP23008
mcp = MCP23008(i2c)
# This assumes that you are using the default address [ i.e. all address
# pins are grounded]
#
#
#
# Defining two outputs on pins 0 and 1
pin0 = mcp.get_pin(0)
pin0.direction = Direction.OUTPUT
pin1 = mcp.get_pin(1)
pin1.direction = Direction.OUTPUT
#
#
# We can now control the pins by setting them to true or false, true being
# high
pin0.value = True
pin1.value = True
#
# and switch them off again by using
pin0.value = False
pin1.value = False
#
#
# We can also use the pins as inputs.
# We will activate the internal pullup as well
#
# first , we need another library
import digitalio
pin2 = mcp.get_pin(2)
pin2.direction = digitalio.Direction.INPUT
pin2.pull = digitalio.Pull.UP
#
#
# Reading the pin value is now as easy as
pin2.value
#
# This will return True if the pin is high ( its default state with pullups # activated, of False if pulled low, by for example a switch of button )
Conclusion
The breakout works as expected, and it is very easy to use with CircuitPython. I can now continue with the actual integration and Software for the RP2040 Mouse Rev 2.0 project.
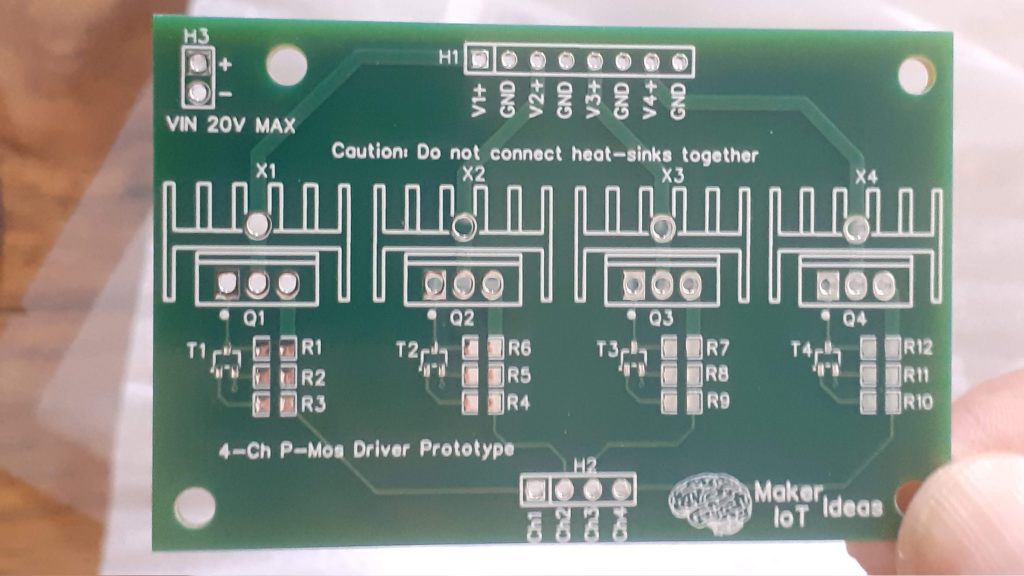
This is a modification of my existing P-MOS driver circuits, intended for use with higher current LED Lights, as well as any other applications requiring a higher current capable P-Channel Mosfet to switch a load.
What is on the PCB?
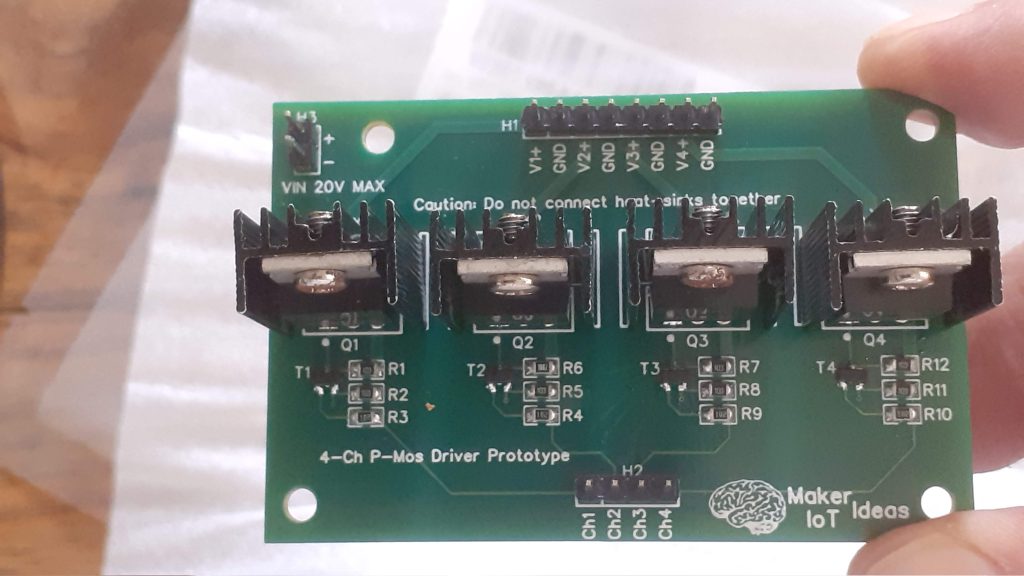
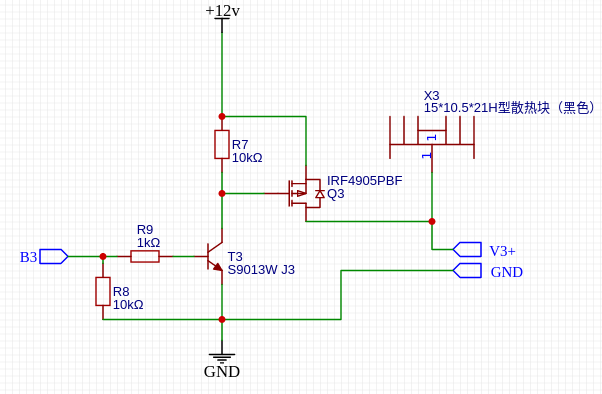
I have used the IRF4905 P-Channe Mosfet here as it can sink up to 74 Amps of current – A complete overkill in many situations. Datasheet. The Mosfet is configured in a high-side switching configuration, thus eliminating problems with ground connections.
To prevent unreliable switching, a transistor is used to switch the gate, which is normally pulled high to keep the device switched off.
I have also included various connection headers for connecting the load, Power supply, as-well-as active high control headers for controlling the driver from a microcontroller. This was especially important as the Gate voltage of the Mosfet is above the acceptable 3.3 volt for use with many of the modern microcontrollers in use today.
It is important o note that I did not yet bother to do very accurate gate current calculations. I do not need super fast switching, and on the bench, the 500mA switching capability of the S9013W transistor gave me satisfactory results.
What is my intended use for this driver?
This is a 12v Automotive Fog light. It is meant to be an aftermarket upgrade. It will also be a very nice focused working light in my workshop, as the lighting is not optimal.
My initial idea is using two of these, PWM controlled from an ESPHome-controlled device to provide me with focused, dimmable lighting for assembly and other operations where a bit of extra light will be needed.
The Fish-eye lens of the internal lamp provides a very focused beam, and from initial testing seems to be exactly what I want.
The problem came in that the LED module consumes quite a bit of current ( 5A for the center lamp, and 3A for the ring light). These currents are way above the capabilities of my existing LED COB driver circuit, thus this MOD.
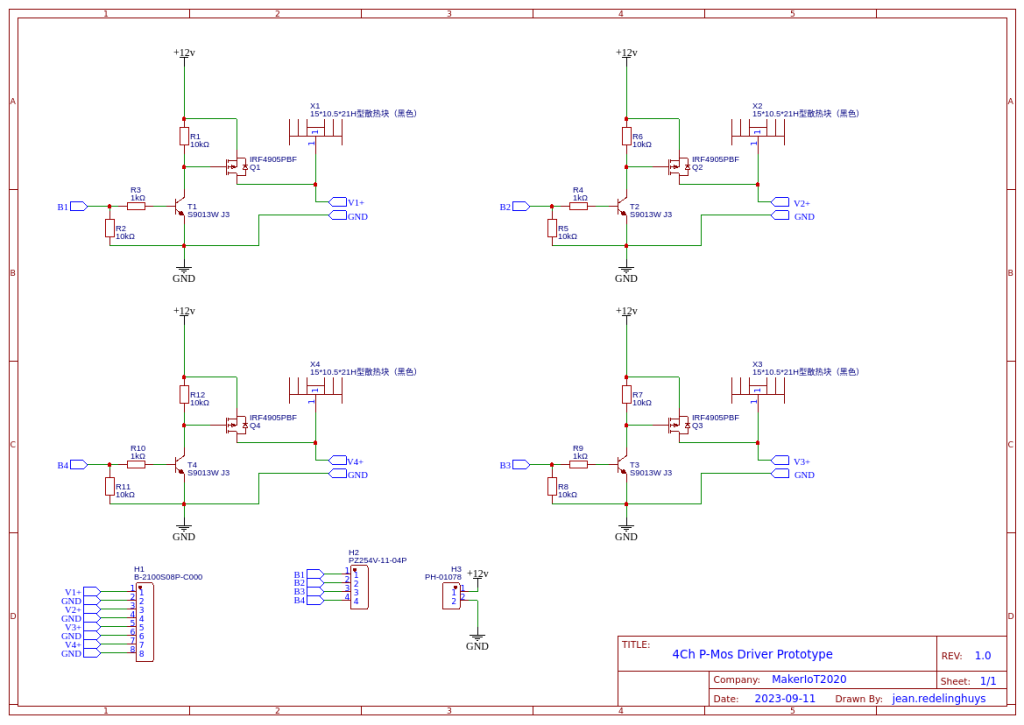
The Schematic
Manufacturing the PCB
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
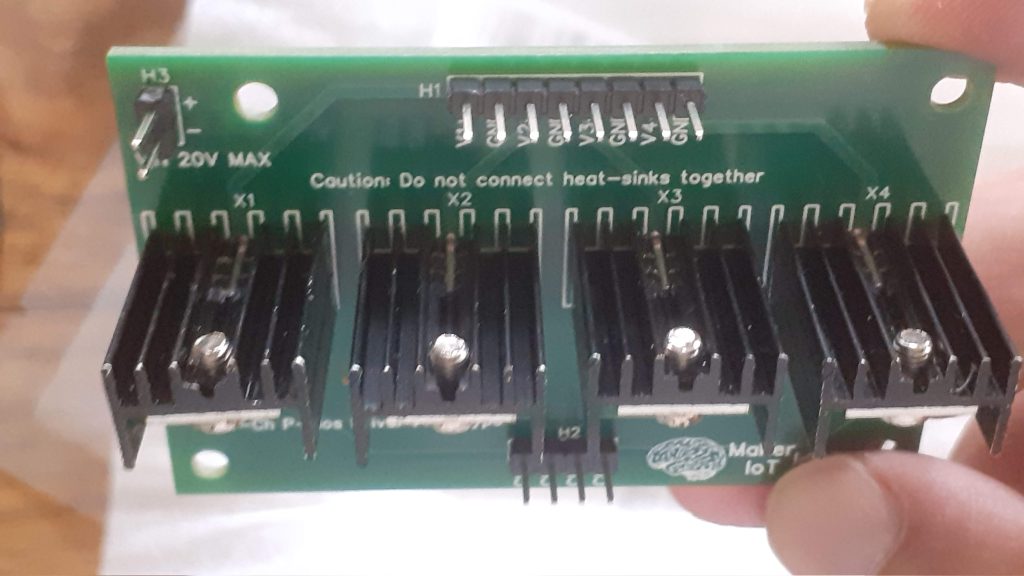
This PCB is definitely quite easy to assemble, as there are only 16 SMD components on the board. These are all easily hand-solderable. The Mosfets and their respective heatsinks are through-hole components and thus super easy as well.
It is very important to note that we should NOT connect the heatsinks together. This is due to the fact that the Heatsink is connected to the DRAIN pin on the MOSFET. Connecting them together will thus short the various channels together.
For my testing procedure, I have connected the driver to the LED Fog light, as well as a 12v supply. Using an ESP8266 running ESPHome, the LED fog light was controlled with PWM. The current draw was 5A and 3A respectively. All of the MOSFETs remained cool to the touch, and the PCB tracks did not heat up as well.
Next steps
The next steps for this project would be to design a PCB that integrates this driver with the ESPHome control device, as well as design and build a suitable enclosure for the two lights and the control unit. This should ideally be mountable on the ceiling above my workbench. It would also be nice to design some sort of gimbal for each light, that can be controlled with stepper motors or servo’s to allow me to position the lights where I need them.
When we are working on a prototype, we always need access to pushbuttons, encoders and even displays to test our ideas in the real world. This Multi-Purpose IO Card was designed to help me do just that…
What is on the PCB?
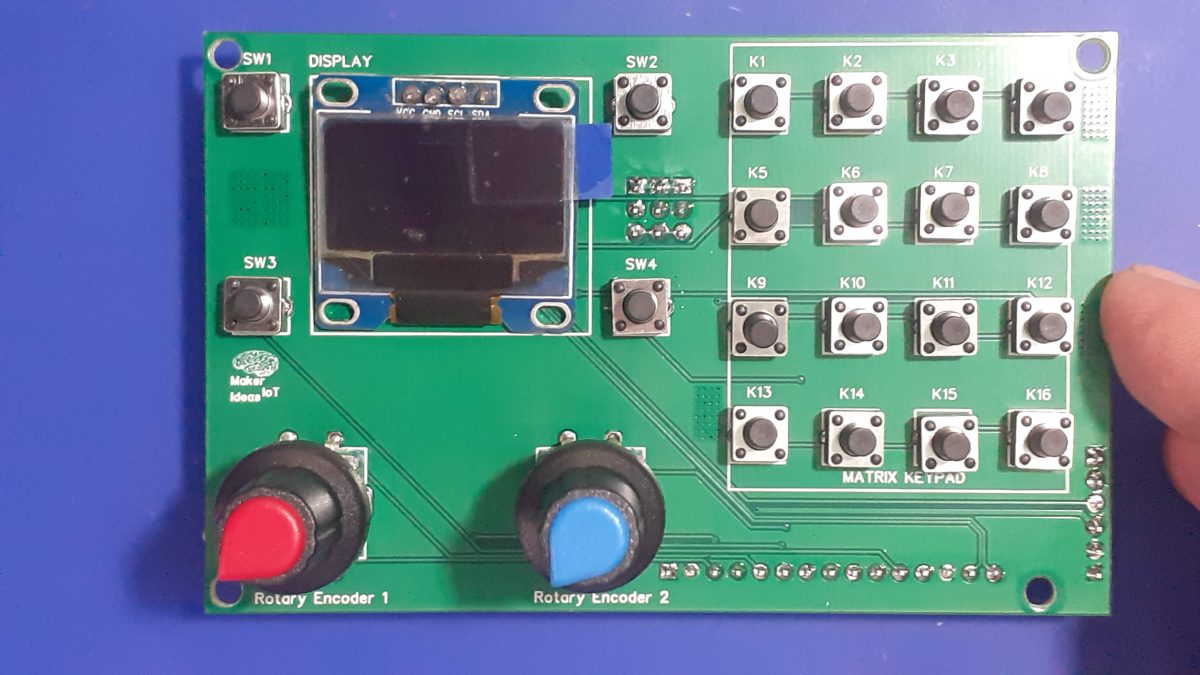
This PCB was designed with my particular work style in mind. I use a lot of I2C devices, IO Expanders, Displays and sensors. It would thus make sense to have I2C on the PCB, to control an OLED display, as well as a PCF8574 IO expander, that is used to drive a 4×4 Matrix Keypad. Two Rotary encoders, as well as another 4 standard push buttons completes the PCB…
The features, summarised is as follows:
1x Matrix Keypad (4×4) Controlled via an PCF8574 IO expander with selectable addressing. 1x SSD1306 OLED I2C Display 4x Momentary pushbuttons, configured to be used with internal pullups – i.e pushing the button pulls the GPIO LOW 2x Rotary Encoders, with integrated Pushbutton, also configured as Active LOW
The board has all of the connectors and jumpers on the back, making it possible to mount it to an enclosure as a control panel.
I have also provided an additional I2C header to make it possible to add additional devices to the I2C bus easily
The PCB in Detail
PCB Top
Starting from left to right, we have two push-buttons, an OLED display, with two rotary encoders below the display, and another two momentary push buttons. On the Right, we have a 4×4 matrix keypad, and various pin headers for connection to a microcontroller of your choice.
On the back, we have the PCF8574 IO expander for the Matric keypad, addressing Jumpers for the IO expander, as well as the two pin headers for connections to and from a microcontroller…
The Pinouts of these are as follows: Horizontal 15 pin 2.54mm connector SDA I2C Data SCA I2C Clock
RE2-D Rotary Encoder 2 Push Button RE2-B Rotary Encoder 2 Pin B RE2-A Rotary Encoder 2 Pin A
RE1-D Rotary Encoder 1 Push Button RE1-B Rotary Encoder 1 Pin B RE1-A Rotary Encoder 1 Pin A
GND VCC 3.3v to 5v DC
The Expansion header extends the I2C Bus, as well as proved access to the interrupt pin on the PCF8574. VCC and GND are also provided.
The Schematic
Manufacturing the PCB
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
The assembly of this PCB was relatively easy, as it contains only a single SMD component. I do however have to alert you to a certain caveat…
On the PCB, the I2C OLED display pinout is, from left to right,
VCC GND SDC SDA
I have however come across similar displays that swap the GND and VCC pins… and some that even have SCL and SDA swapped…
It is thus quite important that you check your display BEFORE soldering it to this PCB…
Addressing the PCF8574 is also quite easy, with the jumper towards the top is a high, and towards the bottom is a low… They are marked A2 A1 A0 and thus, counting in binary, all low will be 0x20h and all high will be ox27h
Also, note that there are NO I2C Pullup resistors on the board. My microcontroller PCB’s usually have these already, and most I2C Sensors, including the OLED Display that we use, already include as well… You should thus check what you have on your own hardware, as it is quite impossible to cater for every situation… In a future version, I may add selectable pullup resistors onto this board as well…
Coding and Firmware
The possible uses of this board is quite broad, and the code possibilities are thus also quite extensive. Since I mainly use ESPHome or the Arduino IDE with most of my projects, I wont be including any specialised code here. I think it is enough to say that almost all of the available PCF8574 Matrix Keypad libraries available for the Arduino IDE will fork with this board…
The pinouts are important, and thus :
Row 0 – P0 Row 1 – P1 Row 2 – P2 Row 4 – P3
Col 0 – P7 Col 1 – P6 Col 2 – P5 Col 3 – P4
As far as ESPHome goes, you will need to 1) Add an I2c bus for your device 2)Add a PCF8574 component 3)Add a Matrix Keypad component, and refer the rows and columns to the pins on the PCF8574 – See below for an example of how I have done that in a previous project.
#I2C bus
i2c:
sda: 4
scl: 5
scan: true
id: I2C_Bus
#
# In my case, SDA is on GPIO4 and SCL is on GPIO5
# This is similar to the standard configuration on a NodeMCU v2 Dev board
#
#
# The next step is to configure the actual IO Expander, which in my case is located
# at address 0x27
#
#PCF8574
pcf8574:
- id: 'pcf8574_hub'
address: 0x27
pcf8575: false
#
# Now we can add the actual keypad interface to the YAML file
# Take note of the difference from the ESP32 file above.
#
#
#KEYPAD
matrix_keypad:
id: mykeypad
rows:
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 0
# In the ESP32 file, we wHereould specify a pin directly like:
#
# -pin: 17
#
# That approach will not work for us.
# The reason for that is that we have to redirect the GPIO to a
# physical pin on the PCF8574 IO expander.
#
# That is done with the following syntax
#
# - pin:
#pcf8574: pcf8574_hub -- This is the ID of the PCF8574 device -
#number: 0 -- The actual pin number
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 1
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 2
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 3
columns:
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 7
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 6
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 5
- pin:
pcf8574: pcf8574_hub
# Use pin number 0
number: 4
keys: "123A456B789C*0#D"
has_diodes: false
The Rotary encoders and momentary push-buttons can be handled in the same manner, using standard libraries in the Arduino IDE, or a rotary encoder component in ESPHome…
The OLED display would also be handled as above, with a DISPLAY component in ESPHome…
Summary and next steps
The next steps, for me at least, would be to design and CNC cut a suitable enclosure for the IO panel/Control panel in order to make it easier to use…
The panel was designed to be a tool to aid me while designing, and part of my never-ending battle getting rid of breadboards.
It does its job well, at least so far, and works as I have intended it to.
Adding a bit of automation to a certain area of the house can definitely help with saving energy. With this Simple Smart Light Controller, I aimed to do just that… Let me give you a tiny bit of context… Houses in SE Asia are built to some “questionable” standards and designs, and electrical installations are usually even more suspect… Our house is no exception. Being a rental, I do not want to go and make changes unless things are outright dangerous… Kitchens are usually a mixture of inside/outside areas, and this is where my device fits in…
The light in the outside kitchen consists of a simple bulb that the owner has routed into the house via an electrical flex cord, at least that was standard… But, due to laziness or just whatever, that cord was never terminated into a proper switch… He just added a plug. This is thus my opportunity to make life a bit easier for myself in that area. I could have opted for a standard switch, but then, automating this can take care of another problem… We constantly forget to switch that light off, as the plug is in a “strange place” that is not usually associated with the kitchen lights…
What I have thus come up with is a simple ESP8266-based solution with a single relay ( optically isolated from the board), as well as a few additional GPIO pins, just in case I want to hang some additional sensors onto this in the future.
The device should also be powered directly from the mains, as adding another external AC to DC adapter would definitely NOT do at all!
What is on the PCB
Lets look at the empty PCB, in order to understand better what is where on the board.
Starting on the Left Side, at the bottom corner, we have our mains voltage input, 220V or 110V, depending on where you live. That goes directly into U1, which is a AC-to-DC converter, providing 3.3v at 1A to the board. Note that I did not place a fuse directly on the board. I prefer to have an inline fuse on the line, which is also accessible from the enclosure.
A series of cutouts on the PCB provides additional mains isolation and also prevents mains voltage tracking towards other tracks in the event of a fault. The Mains area also does not have a copper pour.
In the top left corner, towards the center, is a WAKE jumper. This is connected to GPIO16 and can be used to wake the ESP8266 from “deep sleep” if configured in the firmware.
Relay K1, and its screw terminal connector is in the bottom center of the board, with the relay contacts clearly labelled.
On the right of the PCB, we have the programming header, complete with Auto Flash and Reset circuitry, as well as manual Flash and Reset Buttons below that.
A 3×3 header connector follows, with access to 3.3v, Ground as well as 3 additional GPIO pins for other applications.
Finally, we have the relay control switch, with a few options to connect external switches, either on the 2.54mm header, or via wires soldered to the pads marked SW-A and SW-B
The populated PCB will thus make more sense if we look at the picture above now since we had a detailed look at it above…
The Schematic is made available at the link above.
Configuration and Software
This build was designed with ESPHome in mind, so we will focus on that there. You can however very easily use standard Arduino/ESP8266 code to control this as well…
The YAML configuration for the device will be as follows: (note that this is quite simplified, as I am still fine-tuning the actual features that I require)
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
This device does not need a stencil for assembly, but using one will definitely speed up things. I chose to do this build all by hand, from applying solder-paste, up to placing components.
Soldering was done on a hotplate, as usual, to reflow everything at the same time. TH components were then placed and hand-soldered.
Uploading the initial firmware, after adding the device to ESPHome was done with an external USB-to-UART converter. All further firmware changes were made via OTA.
Enclosure and some of the wiring
It is important to mention here that this PCB is powered by mains voltage. I chose to use an inline fuse, BEFORE the connector on the PCB. It is also notable that the relay common is connected to the live wire, BEFORE the fuse, as the lightbulb acts as its own fuse – it blows when a fault occurs.
The Lightbulb neutral will be connected to the circuit breaker, together with the device live and neutral.
This way, the fuse only acts on the actual device, and I can use a lower-rating fuse, since I do not have to accommodate the current from the lightbulb as well…
Summary
The device works as planned, with no problems… Below is some pictures from it in Home Assistant
COB LED lights, or Chip-on-Board LED lights, are a type of LED light that has all of the LED chips mounted on a single substrate. This makes them more efficient than traditional LED lights, which have individual LED chips mounted on a circuit board. COB LED lights also produce a more uniform light output, and they can be used in a wider variety of applications.
Here are some of the benefits of using LED COB lights:
are very efficient, and they can produce up to 100 lumens per watt. This means that they use less energy than traditional light bulbs, and they can save you money on your energy bills.
produce a more uniform light output than traditional LED lights. This means that they do not create hot spots or shadows, and they provide a more comfortable light to work under.
are very durable, and they can last for many years. They are not as susceptible to damage from heat or vibration as traditional light bulbs, and they can withstand harsh conditions.
can be used in a wide variety of applications, including indoor and outdoor lighting, commercial and residential lighting, and automotive lighting.
They can however be quite a pain to power in a traditional 110v/220v AC wired house or workshop, as some of them actually required DC current to work. I have decided to use a pair of them to provide additional, dimmable light at my electronics workbench, a place where extra light is sometimes a very necessary commodity. The ability to dim the lights will definitely aid in many scenarios as well.
The Variable voltage Power module was designed specifically for this project
The project consists of two main parts, the first being the Variable Voltage Power Module, which I published a few days ago. The particular COB lights that I will be using, were scavenged from a battery-operated emergency light panel, which had some problems which were not economical to repair. The light modules themselves, however, looked good and were perfectly working as well. The only issue was that they were 6v DC. So using straight 12v there was out of the question. 6V being an odd voltage in my lab, I designed the module above specifically to provide that.
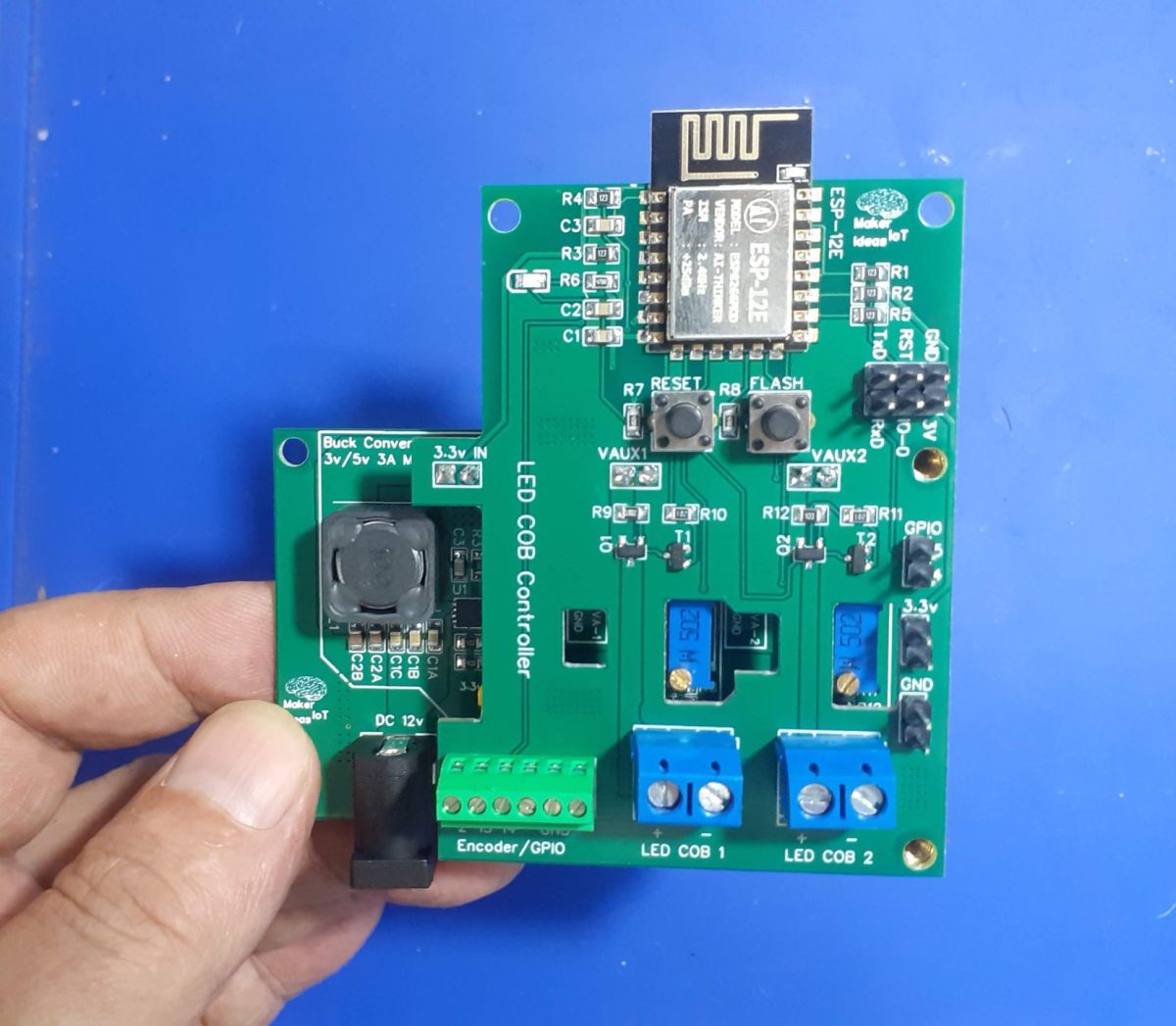
LED COB Controller stacked on top of Variable Voltage Poser Module
The second part of the project consists of a simple Custom ESP-12E PCB. Why ESP12-E? Well, I have a lot of them lying in stock, and since I won’t need any advanced features, commonly found on the bigger ESP32s, I decided to design around something that I have in stock, rather than overcomplicate the design with a bigger more advanced chip. The project features a rotary encoder, to adjust light intensity, as well as push buttons to toggle the lights on or off…
All of this is of course controlled with ESPHome. This choice gives me the option of manual or fully automatic control from HomeAssistant. It also saves me a lot of coding, as everything usually just works.
What is on the PCB?
We shall focus mainly on LED COB Controller PCB. In order to understand everything, please refer to the picture below:
LED COB controller without Power Module
The board consists of a few sections, which can be divided as follows:
ESP-12E (8266) supporting circuitry
The top area is mainly the supporting circuitry for the ESP-12E, which includes a 6-pin header to flash firmware, the classic ESP32/8266 Auto Flash/Reset circuit, and manual Flash and Reset switches. Note that the board DOES NOT contain any USB-to-Serial circuitry. I usually use those only once or twice, and update firmware OTA after that. Using an external USB-to-Serial adapter is thus sufficient for my purposes.
Power and LED Control circuitry
Power enters the board in the center, using header pins mounted on the bottom of the PCB. From left to right, these are 3.3v and then two variable voltage inputs. These all originate from the Variable voltage Power Module, mounted below the main PCB. The LED Control circuitry consists of two P-Channel Mosfets, the configuration of which was previously tested in another project, the “P-MOS MOSFET Driver Board“, also published a few weeks ago. The SI2301 P-Channel Logic Level MOSFET, used here is capable of switching up to 2.3A at 20v, and thus more than capable of handling the 300mA that the LED COB modules require.
Four cutouts are provided to access test points on the power module below, as well as the potentiometers used to set the voltage that will ultimately be sent to the LED COB Modules.
Wide copper traces connect the Mosfet’s to Screw Terminals for the LED Modules.
The Final part of the PCB is dedicated to control interfaces. A single 6-way screw terminal is provided at the bottom left corner, this is used to connect a rotary encoder, or give direct access to additional GPIO pins. On the Right hand side of the PCB, a series of header pins give access to additional 3.3v and ground connections, in addition to GPIO 4 and 5, which is usually used for I2C…
LED COB Controller stacked on top of Variable Voltage Poser Module
The Schematic
Configuration and Software
As mentioned above, this device was designed to be used with ESPHome. The configuration is thus a single YAML file and can be greatly customised to suit your exact needs…
With that in mind, I present here a VERY basic YAML file, that will toggle the LED lights on or off on pressing the encoder switch, as well as adjust the brightness by turning the encoder.
esphome:
name: led-cob-controller
friendly_name: LED_COB-Controller
esp8266:
board: nodemcuv2
restore_from_flash: True
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "<esphome generated>"
ota:
password: "<esphome generated>"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Led-Cob-Controller"
password: "<your recovery password here>"
captive_portal:
# I suggest you only copy paste from here on downwards.
# Setup the default device in ESPHome, and when it is available,
# come back and add the commands below here
text_sensor:
- platform: wifi_info
ip_address:
name: IP Address
ssid:
name: SSID
bssid:
name: BSSID
mac_address:
name: Wifi MAC
scan_results:
name: WiFi Scan Results
sensor:
- platform: adc
pin: VCC
name: "ESP8266 Chip Voltage"
id: mcu_voltage
unit_of_measurement: "V"
device_class: "voltage"
accuracy_decimals: 2
update_interval: 60s
entity_category: "diagnostic"
- platform: wifi_signal
name: "WiFi Signal Sensor"
id: wifi_strength
device_class: "signal_strength"
unit_of_measurement: "dBm"
update_interval: 240s
entity_category: "diagnostic"
- platform: copy # Reports the WiFi signal strength in %
source_id: wifi_strength
name: "WiFi Signal Strength"
filters:
- lambda: return min(max(2 * (x + 100.0), 0.0), 100.0);
unit_of_measurement: "%"
entity_category: "diagnostic"
- platform: copy
source_id: rcbright
name: "LED Light Brightness"
unit_of_measurement: "%"
filters:
- lambda: return (x * 100);
- platform: rotary_encoder
name: "Brightness Control"
id: rcbright
min_value: 0.00
max_value: 100.00
publish_initial_value: True
restore_mode: RESTORE_DEFAULT_ZERO
pin_a:
number: GPIO13
inverted: True
mode:
input: True
pullup: True
pin_b:
number: GPIO2
inverted: True
mode:
input: True
pullup: True
resolution: 1
accuracy_decimals: 2
filters:
- lambda: return x / 100 ;
on_clockwise:
- light.control:
id: led_light1
brightness: !lambda |-
// output value must be in range 0 - 1.0
return id(rcbright).state ; // /100.0;
- light.control:
id: led_light2
brightness: !lambda |-
// output value must be in range 0 - 1.0
return id(rcbright).state ; // /100.0;
on_anticlockwise:
- light.control:
id: led_light1
brightness: !lambda |-
return id(rcbright).state ;
- light.control:
id: led_light2
brightness: !lambda |-
// output value must be in range 0 - 1.0
return id(rcbright).state ; // /100.0;
binary_sensor:
- platform: gpio
pin: GPIO14
id: light_switch
name: "Light Switch"
device_class: light
on_click:
then:
- light.toggle: led_light1
- light.toggle: led_light2
light:
- platform: monochromatic
name: "LED1_LIGHT_TEST"
id: led_light1
output: output_component1
- platform: monochromatic
name: "LED2_LIGHT_TEST"
id: led_light2
output: output_component2
# Example output entry
output:
- platform: esp8266_pwm
id: output_component1
pin: GPIO12
- platform: esp8266_pwm
id: output_component2
pin: GPIO16
Manufacturing the PCB
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
This device does not need a stencil for assembly, but using one will definitely speed up things. I chose to do this build all by hand, from applying solder-paste, up to placing components.
Soldering was done on a hotplate, as usual, to reflow everything at the same time. TH components were then placed and hand-soldered.
Uploading the initial firmware, after adding the device to ESPHome was done with an external USB-to-UART converter. All further firmware changes were made via OTA.
The board performs well, with only slight heating of the LM317G variable voltage regulators on the power module when both LED COB modules are at 100% brightness. The current draw is within limits and seems to peak at about 600mA per COB…
Conclusion
This project took quite a while to move from idea to practical reality, mainly due to being busy with other more important stuff. In the end, I am happy that I sat down and did it, because it definitely will become a valuable tool in my work area.
Powering electronics projects are always challenging. This Variable voltage Power Module was designed to solve such a problem for a specific project that I am working on.
The ESP32 and their smaller cousin the ESP8266 are pretty well known for their high power requirements. Having used quite a few of these in various projects over the years, I wanted a power module that can supply me with enough current to keep these hungry little chips satisfied. I also needed variable voltages with more modest current capabilities, to drive LED COB modules for example.
The idea thus came to me to combine two recent projects, that I have been using together on the bench with great effect. These two are the Variable Breadboard Power Module, based on the LM317G, and the DC-DC Buck Converter that I designed a short time ago. Between these two devices, I can deliver up to 3A at 3v or 5v, or a variable voltage at up to 1.5A.
Let us take a look at what exactly was done here.
Variable Power Module
What is on the PCB?
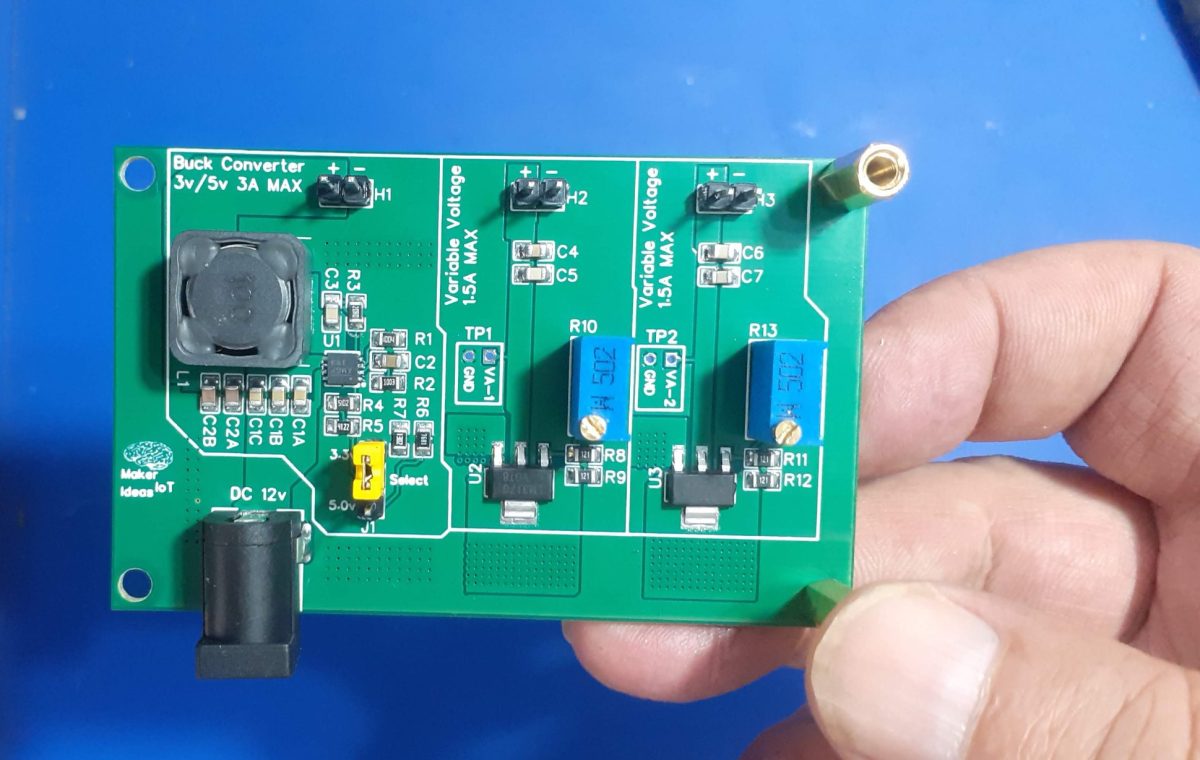
The PCB consists of 3 independent power circuits, the first of which is a DC-to-DC Buck module, based on the MP9943 from MPS. This chip can source up to 3A at a preset voltage. In my case, I chose 3.3v and 5v, as I use those the most.
The second and third parts are a mirrored section, with the humble LM317G at their hearts. These are set up as variable voltage regulators, with their outputs adjustable via R10 and R13. These two can source two independent voltages, from about 1.0v right up to about 11.5v ( if VCC is 12V) at a respectable 1.5A or current.
All of this is powered by a single 12v Power supply. Note that the 12v supply should be capable of sourcing at least 3A of its own…
The stepped-down voltages are provided via 3 2-way headers at the top of the PCB.
How do you use the board?
Using the module is easy. Power it from 12v DC ( or up to 24v if you really want to)
The 3.3v or 5v output is selected using jumper J1 ( Please switch the power off first, BEFORE you change this). The selected voltage will be available at H1
H2 and H3 provide variable voltages, that can be set using R10 for H2 and R13 for H3. Turning the potentiometer anti-clockwise will reduce the voltage, clockwise to increase.
Test points ( TP1 and TP2) can be probed with a multimeter while adjusting the voltages.
The Schematic
Manufacturing the PCB
I choose PCBWay for my PCB manufacturing. Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
This PCB uses some very tiny components, so a stencil is highly recommended.
The Buck Converter IC is especially tiny.
Most of the other components can be soldered by hand, but I chose to do the entire assembly on a hotplate to reflow everything at the same time.
Testing
Variable Power Module
After assembly, I tested everything, measuring voltages with a multimeter, as well as adjusted H2 and H3 down to 6v, as I would be using the module on another project. I also tested the ripple on the Buck converter with an Oscilloscope, and it was well within the specs stated by the datasheet, at about +/- 100mV.
The entire module draws about 650mA at no load, and up to 3A when powering 2 6v LED COB modules and an ESP32 with I2S Audio modules connected as well. Most of the current actually being drawn by the LM317G chips. The Buck converter is actually quite economical, drawing a modest 500mA at full load ( tested with a separate module that only contains a single buck converter module).
Conclusion
The power module works exactly as expected. It will perform well for its intended purpose, i.e powering an ESP12-E (8266) ESPHome device with two 6v LED COB modules in PWM mode, as well as an I2C display and various other sensors. In that application, I have successfully tested the entire project with a modest 12v at 1A wall-brick transformer, with no overheating or power shortage on any of the components. That is thus a win, in my books at least.
In a previous post this month I introduced my 4×4 matrix keypad. That keypad was designed to be directly interfaced to a microcontroller’s GPIO pins or alternatively to an IO expander chip like the PCF8574. That design, while working very well had the problem of requiring 8 GPIO pins to function correctly.
GPIO pins on a microcontroller can be considered very precious resources, and it should then be logical to assume that we should find a way to use these GPIO pins in a more conservative way, to allow us to interface more peripherals.
I solved this problem by integrating the keypad with an IO Expander on the same PCB. That will allow us to get away with using only 2 GPIO pins, and also open up the option of adding more keypads to the I2C bus, in the event that we need that many keys for a particular project.
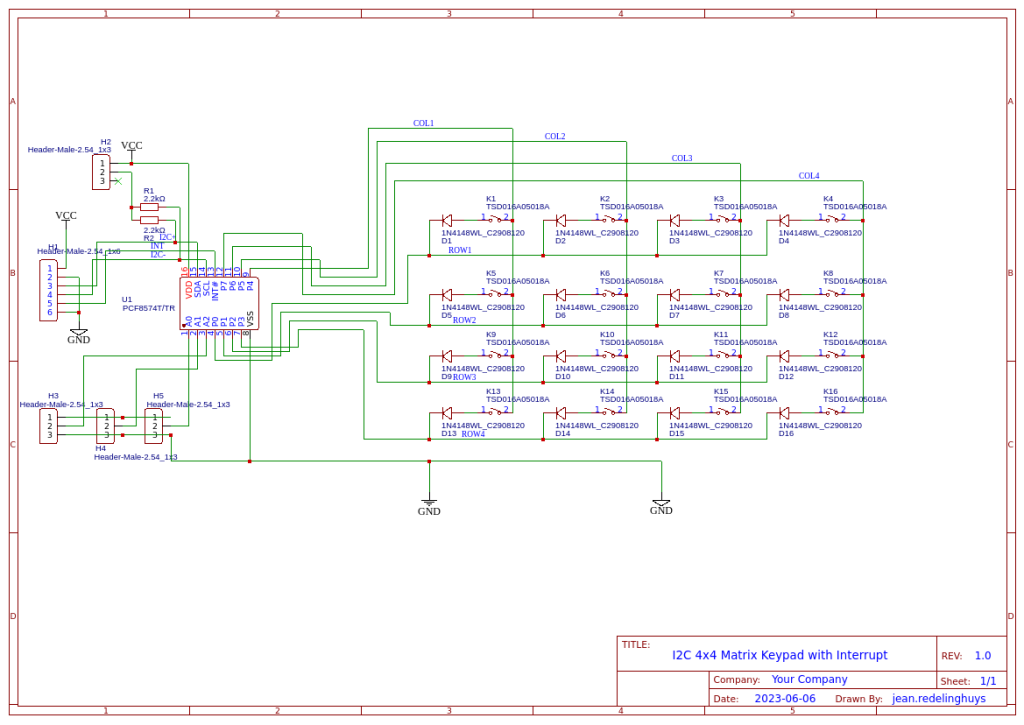
The Schematic
I2C 4×4 Matrix Keypad Schematic
Looking closely at the schematic, we can see that it is exactly the same basic keypad circuit that I used in the initial design. The only difference is that in this design, I have integrated a PCF8574 directly onto the PCB.
Some additional features include selectable I2C Pullup resistors ( usually my microcontroller development boards already include those) that can be activated with a jumper when needed. There are also a set of address selection jumpers, making it possible to stack keypads together into a bigger keyboard if you require something like that. Note that, in this version of the hardware, I did not include headers for stacking.
The keypad can be powered by a DC power source of 3.3v to 5v.
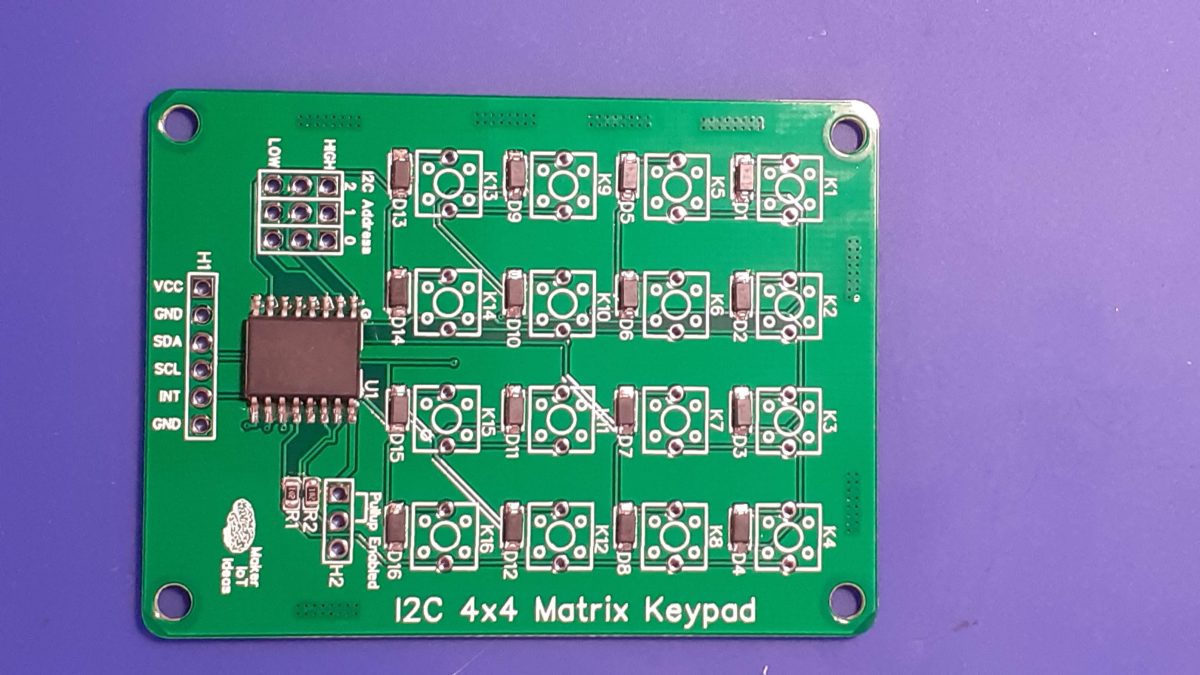
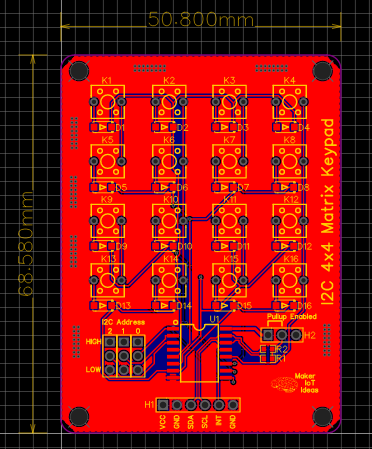
The PCB
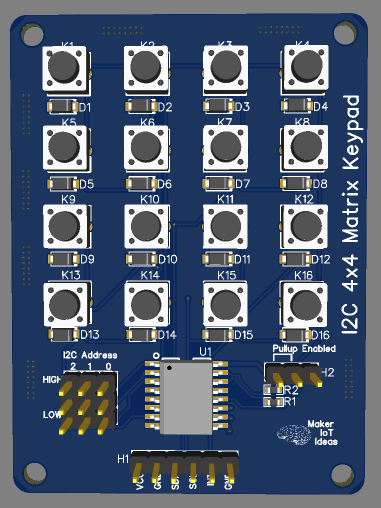
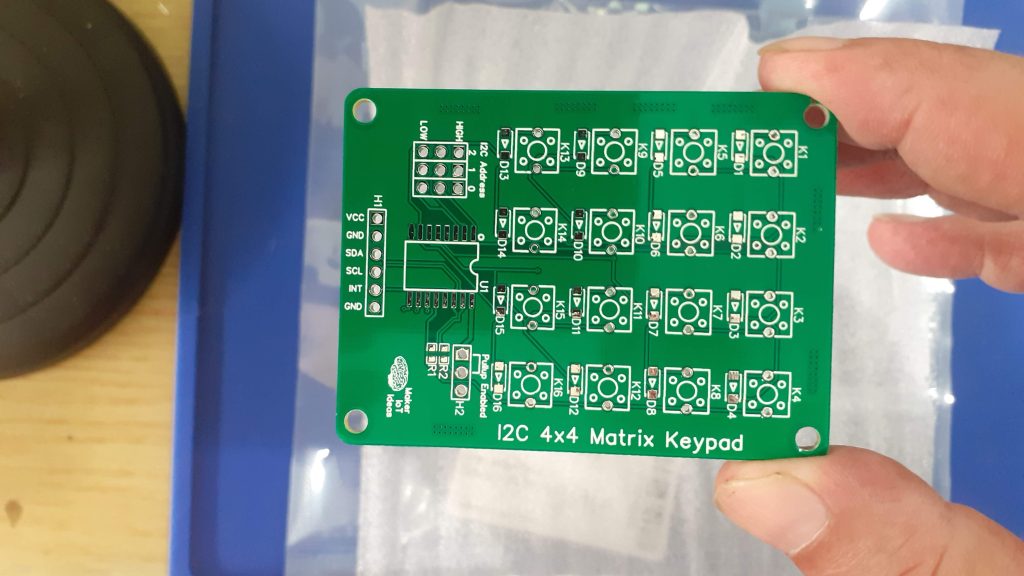
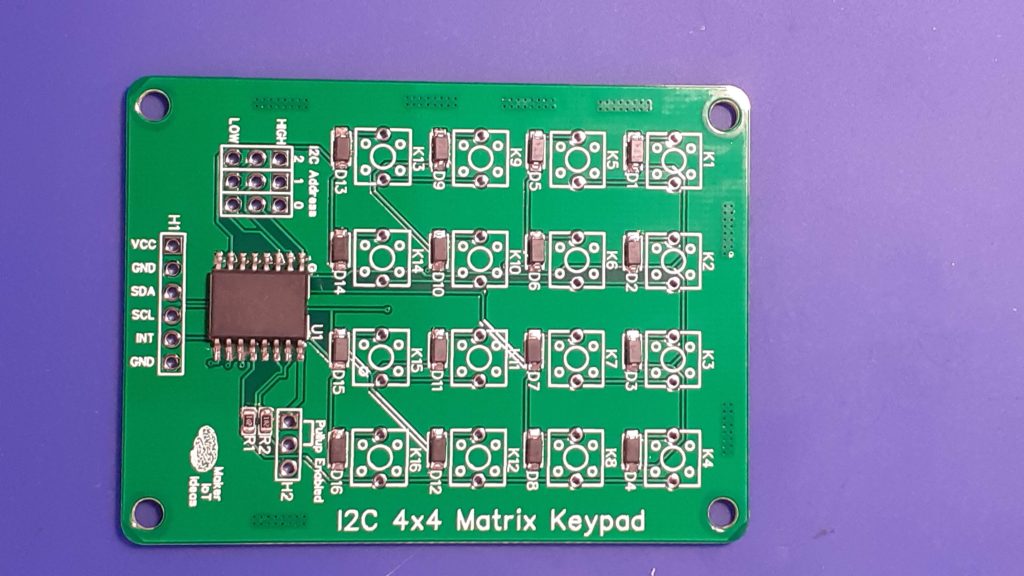
I2C Keypad PCB
3D Render of the I2C Keypad
The PCB is a double-layer board of 68.8mm x 50.8mm. Male header pins provide access to the connections as well as address and pullup resistor jumpers. In my build, I have mounted these male headers on the back of the PCB. That makes it possible to mount the Keypad in an enclosure without having the jumpers “stick out” and get in the way.
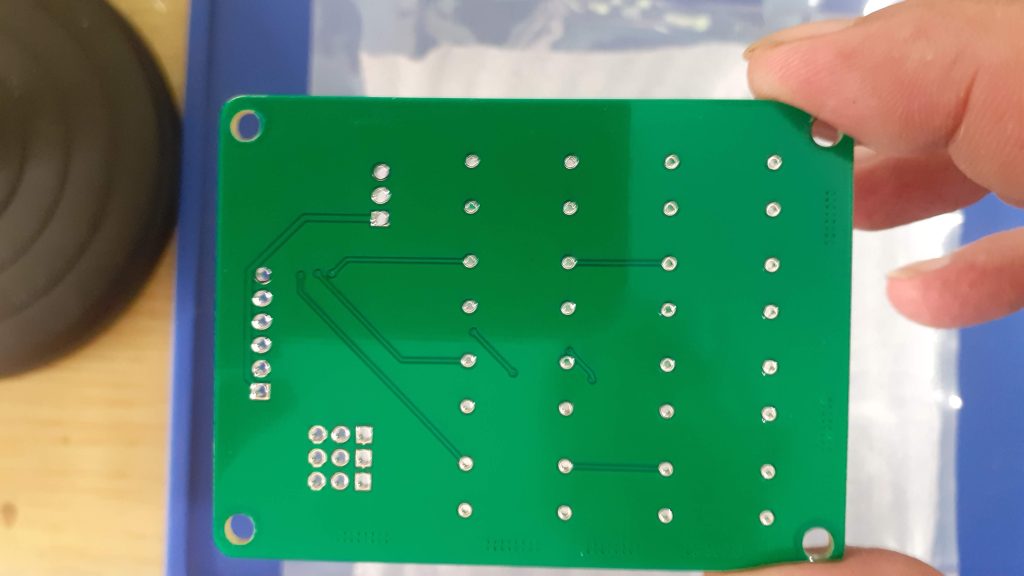
The top layer of the I2C Keypad PCBBottom Layer
Manufacturing
I choose PCBWay for my PCB manufacturing. This month, PCBWay is also celebrating its 9th anniversary, and that means that there are quite a lot of very special offers available.
Why? What makes them different from the rest?
PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
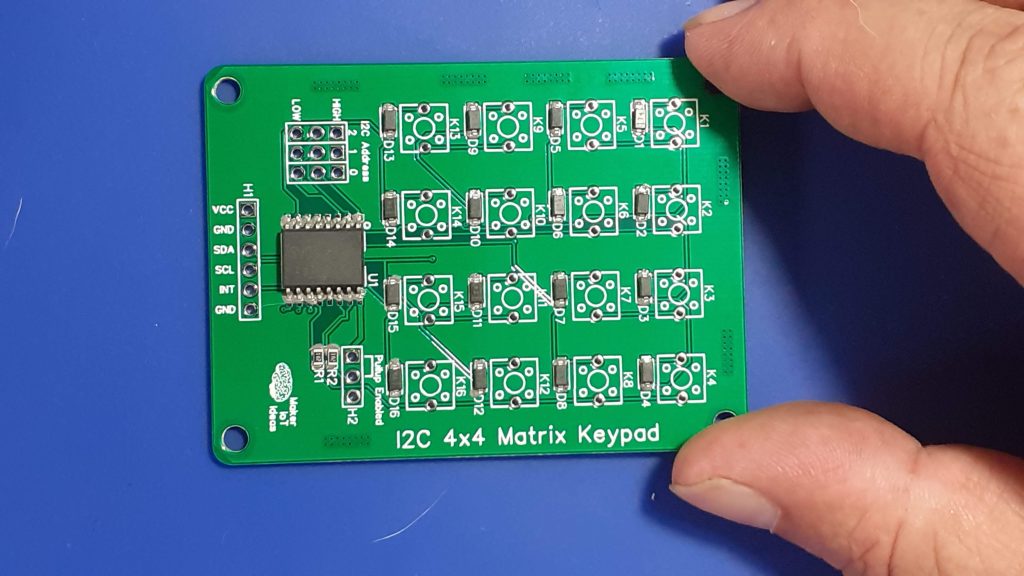
The assembly of this PCB was quite easy and quick. A stencil is not required. All SMD components are 0805 or bigger. It would thus be quite easy to solder them all by hand with a fine-tipped soldering iron.
I have however used soldering paste and hot air to reflow the components, as it is the fastest, in my opinion, and definitely looks neater than hand soldering.
After placing SMD components onto solder paste – ready for reflow solderingAfter Reflow soldering with Hot Air
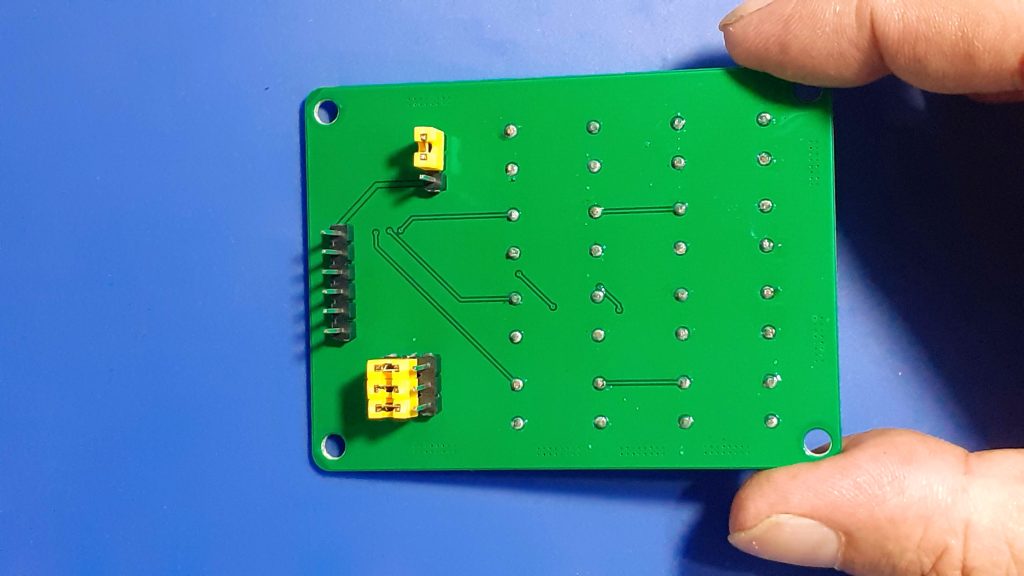
The board is now ready to solder the switches and header pins in place. As already mentioned above, I chose to assemble the headers on the back of the PCB to prevent them from interfering with any enclosure that I may later use with the keypad.
Final AssemblyNote that I assembled the headers onto the back of the PCB.
Testing and Coding
Testing the keypad consisted of a few steps, the first of which was ensuring that there were no short circuits, as well as that all the momentary switches worked. This was done with a multimeter in continuity as well as diode mode, with probes alternatively on each column and row in turn, while pressing the buttons.
The next stage was testing the I2C IO Expander. This was done with a simple I2C Scanning sketch on an Arduino Uno. It did not do a lot, but, I could see that the PCF8574 is responding to its address and that the pullup resistors work when enabled. This test was repeated with my own ESP8266 and ESP32 boards, this time with pullup resistors disabled, as these boards already have them onboard.
Coding came next, and it was another case of perspectives. It seems like all commercial keypads do not have diodes. This affects the way that they work with a given library. It seems that software developers and hardware developers have different understandings of what a row and a column is.
This meant that, due to the fact that I have diodes on each switch, and the way that the library work – which pins are pulled high and which are set as inputs -, I had to swap around my rows and columns in the software to get everything to work. On a keypad with the diodes replaced with 0-ohm links, that was not needed.
A short test sketch follows below:
Note that with was run on an ESP8266-12E, therefore the Wire.begin() function was changed to Wire.begin(4,5); in order to use GPIO 4 and GPIO 5 for I2C
Another point to note is that the keypad Layout will seem strange. Remember that this is due to the diodes in series on each switch. That forces us to swap around the Rows and the Columns in the software, resulting in a mirrored and rotated left representation of the keypad. It looks funny, but believe me, it actually still works perfectly.
#include <Wire.h>
#include "Keypad.h"
#include <Keypad_I2C.h>
const byte n_rows = 4;
const byte n_cols = 4;
char keys[n_rows][n_cols] = {
{'1', '4', '7', '*'},
{'2', '5', '8', '0'},
{'3', '6', '9', '#'},
{'A', 'B', 'C', 'D'}};
byte rowPins[n_rows] = {4, 5, 6, 7};
byte colPins[n_cols] = {0, 1, 2, 3};
Keypad_I2C myKeypad = Keypad_I2C(makeKeymap(keys), rowPins, colPins, n_rows, n_cols, 0x20);
String swOnState(KeyState kpadState)
{
switch (kpadState)
{
case IDLE:
return "IDLE";
break;
case PRESSED:
return "PRESSED";
break;
case HOLD:
return "HOLD";
break;
case RELEASED:
return "RELEASED";
break;
} // end switch-case
return "";
} // end switch on state function
void setup()
{
// This will be called by App.setup()
Serial.begin(115200);
while (!Serial)
{ /*wait*/
}
Serial.println("Press any key...");
Wire.begin(4,5);
myKeypad.begin(makeKeymap(keys));
}
char myKeyp = NO_KEY;
KeyState myKSp = IDLE;
auto myHold = false;
void loop()
{
char myKey = myKeypad.getKey();
KeyState myKS = myKeypad.getState();
if (myKSp != myKS && myKS != IDLE)
{
Serial.print("myKS: ");
Serial.println(swOnState(myKS));
myKSp = myKS;
if (myKey != NULL)
myKeyp = myKey;
String r;
r = myKeyp;
Serial.println("myKey: " + String(r));
if (myKS == HOLD)
myHold = true;
if (myKS == RELEASED)
{
if (myHold)
r = r + "+";
Serial.println(r.c_str());
myHold = false;
}
Serial.println(swOnState(myKS));
myKey == NULL;
myKS = IDLE;
}
}
Conclusion
This project once again delivered what I set out to achieve. It has some quirks, but nothing serious. Everything works as expected, both in the Arduino IDE/platform IO realm, as well as in ESPHome. It is worth noting that in ESPHome, we do not need to swap the rows and columns to use the Keypad component. Do remember to leave the has_diodes flag to false though…
A driver is needed to switch a P-Channel MOSFET because the gate of a P-Channel MOSFET needs to be driven to a voltage that is more negative than the source in order to turn it on. This can be difficult to do with low-voltage logic, such as 5V or 3.3V. A driver can provide the necessary voltage and current to turn on the P-Channel MOSFET, even when the logic voltage is low.
Here are some of the benefits of using a driver to switch a P-Channel MOSFET:
Increased switching speed: A driver can provide the necessary current to charge and discharge the gate capacitance of the P-Channel MOSFET quickly, which results in faster switching speeds.
Reduced power consumption: A driver can help to reduce power consumption by providing the necessary current in a short pulse, rather than a continuous stream of current.
Improved noise immunity: A driver can help to improve noise immunity by providing a clean and isolated signal to the gate of the P-Channel MOSFET.
If you are using a P-Channel MOSFET in your circuit, it is a good idea to use a driver to switch it. This will help to ensure that the MOSFET is switched quickly and efficiently and that it is protected from noise.
Here are some of the different types of drivers that can be used to switch P-Channel MOSFETs:
Logic level drivers: These drivers are designed to work with low-voltage logic, such as 5V or 3.3V. They typically have a high output voltage, which can be used to drive the gate of a P-Channel MOSFET.
High-side drivers: These drivers are designed to provide a high voltage to the gate of a P-Channel MOSFET. They are often used in circuits where the P-Channel MOSFET is used to switch a high-voltage rail.
Isolated drivers: These drivers provide an isolated signal to the gate of the P-Channel MOSFET. This is useful in circuits where it is important to prevent noise from entering the circuit.
Why did I decide to design this prototype?
The Story behind the prototype
This driver PCB is part of a solution for a project involving a set of 6v LED lights. Each of the LED lights requires +/- 300mA @ 6v to operate efficiently. I want to control these from a Microcontroller, either an ESP32 or even the XIAO RP2040 or similar. The current sink capability of an individual GPIO pin on these microcontrollers is limited, in the case of the RP2040 it is limited to 3mA per pin.
This prototype is an attempt to test out some basic driver ideas that might perform correctly for my particular needs, being
To stay within the limitations of the particular microcontroller GPIO current specifications
To be able to use any of the particular microcontrollers, without having to design a specific solution tailored to a specific device
The Schematic
I decided to keep things extremely simple to start with, using a very simple circuit consisting of only 4 components per channel. These are : – an S9013 NPN BJT Transistor, capable of switching up to 500mA of current – a SI2301 P-Channel Logic Level MOSFET, capable of switching up to 2.3A – 10k pullup-resitor – 1k resistor on the base of the BJT
The theory of operation is as follows: The pullup resistor, R8, keeps the gate of the MOSFET (Q4) positive, thus ensuring that Q4 stays turned off when T4 is turned off. A HIGH signal at B4 will turn on T4, which will in turn pull the gate of Q4 to ground, turning Q4 on in the process. That will in turn turn on the load ( connected at 4+ and 4- ).
It is important to note here that the value of R8, 10K at the moment, is not finalised, and may change to increase the performance of the circuit.
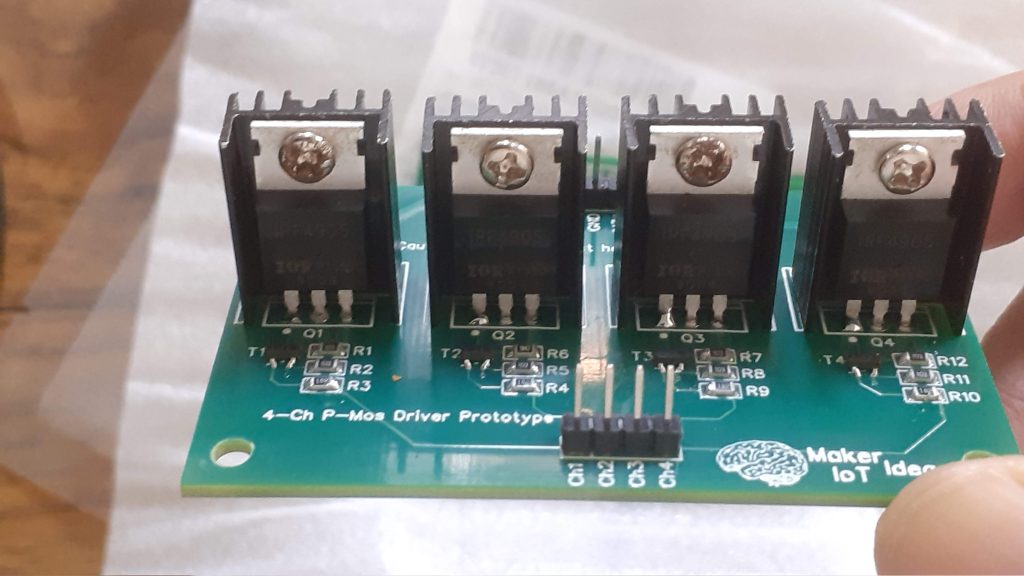
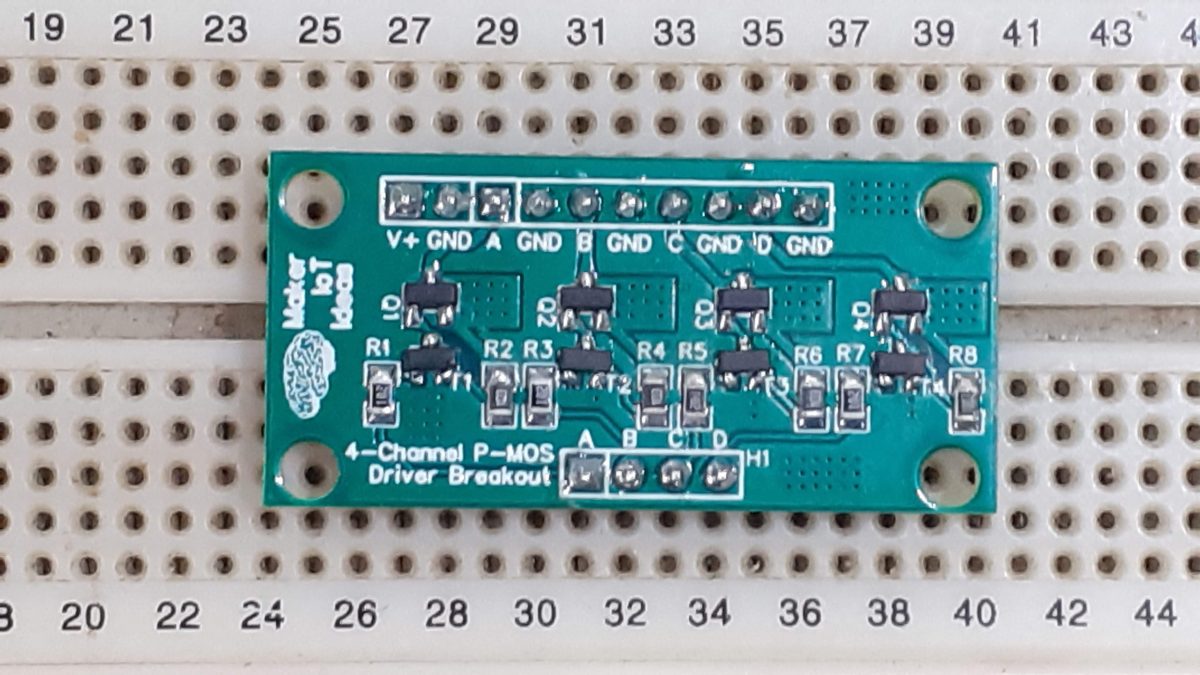
The PCB
The board was made to fit on a standard breadboard or be used as a standalone module, depending on the position of the male header pins.
Manufacturing
I choose PCBWay for my PCB manufacturing. This month, PCBWay is also celebrating its 9th anniversary, and that means that there are quite a lot of very special offers available.
https://youtu.be/Oc9lOUkIlik
Why? What makes them different from the rest? PCBWay‘s business goal is to be the most professional PCB manufacturer for prototyping and low-volume production work in the world. With more than a decade in the business, they are committed to meeting the needs of their customers from different industries in terms of quality, delivery, cost-effectiveness and any other demanding requests. As one of the most experienced PCB manufacturers and SMT Assemblers in China, they pride themselves to be our (the Makers) best business partners, as well as good friends in every aspect of our PCB manufacturing needs. They strive to make our R&D work easy and hassle-free.
How do they do that?
PCBWay is NOT a broker. That means that they do all manufacturing and assembly themselves, cutting out all the middlemen, and saving us money.
PCBWay’s online quoting system gives a very detailed and accurate picture of all costs upfront, including components and assembly costs. This saves a lot of time and hassle.
PCBWay gives you one-on-one customer support, that answers you in 5 minutes ( from the Website chat ), or by email within a few hours ( from your personal account manager). Issues are really resolved very quickly, not that there are many anyway, but, as we are all human, it is nice to know that when a gremlin rears its head, you have someone to talk to that will do his/her best to resolve your issue as soon as possible.
The assembly of the PCB does not require any special tools, and can be done completely by hand if you choose. A very fine-tipped soldering iron should be perfect.
I chose to go the hot-air and solder-paste route, as it is faster, and looks neater in the end. The use of a stencil was not required.
The total assembly took about 5 minutes in total.
Testing
Testing the completed PCB module was performed with one of the LED light modules connected to each MOSFET Channel in turn, and then applying a voltage signal, or ground, to the control pin ( marked A to D on the picture above)
That was followed by connecting an Oscilloscope and Signal Generator to the control pins, as well as the outputs, and observing the waveforms during operation. A square wave output from the signal generator provided the switching signal.
Conclusion
The module works as expected, but the pullup resistor value needs to be fine-tuned to provide a better switching response on the MOSFET at high frequency. I am however happy with the initial performance, and can now move on to improving the circuit to perform to my specifications.