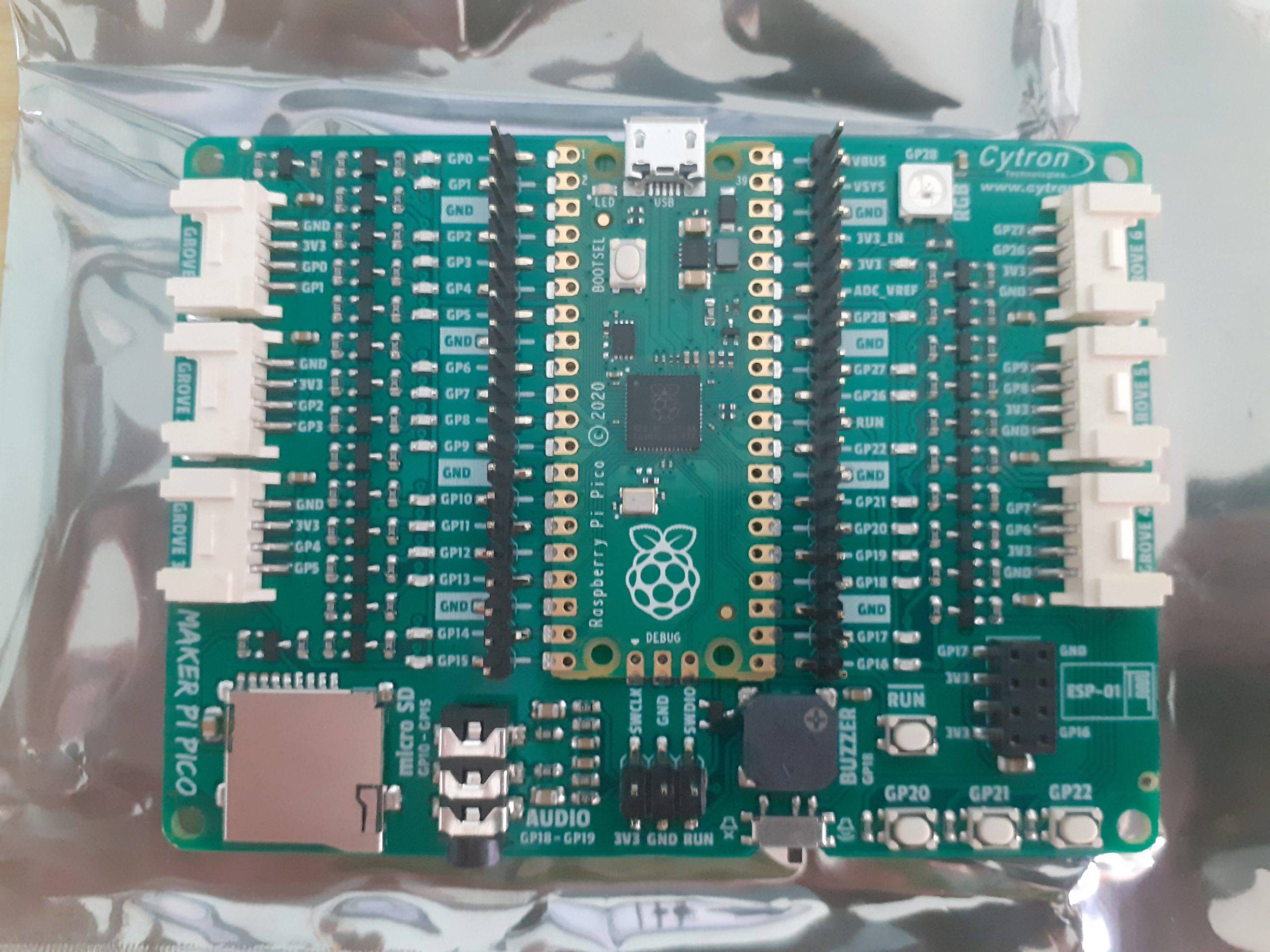
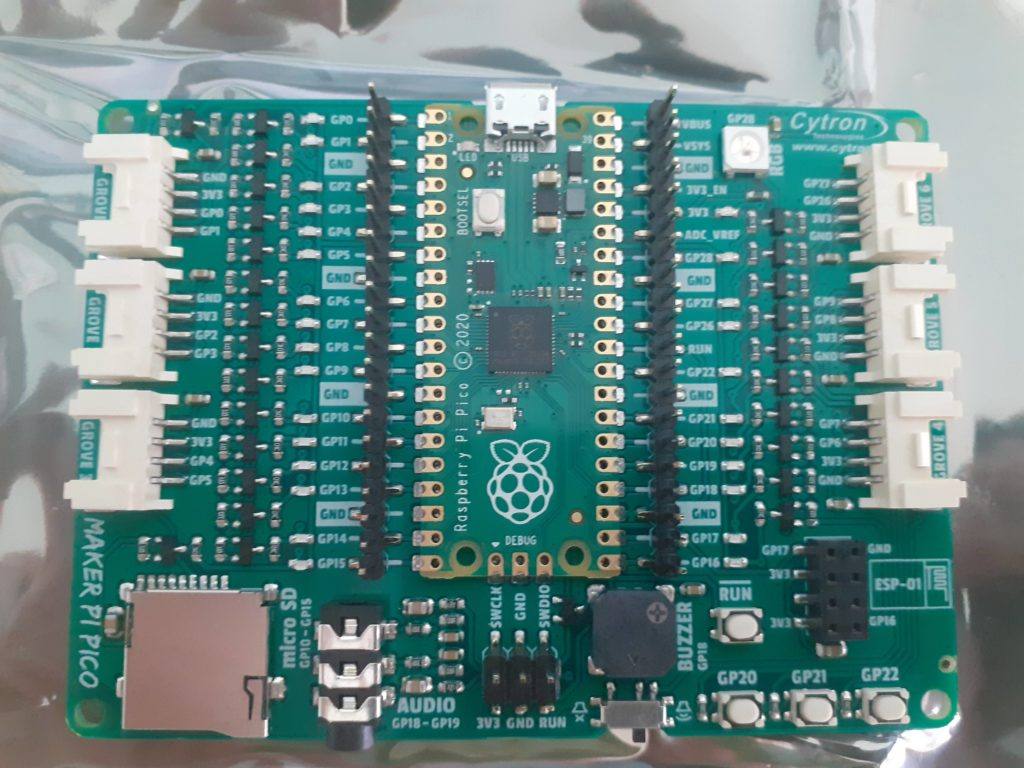
While everybody in the Maker Community are slowly coming to terms with the release of the RPi Pico (The new development board based on the RP2040 by the Raspberry Pi Foundation) a few days ago, I got my hands on one of the first maker-friendly development boards designed with the Pico in mind. The Maker Pi Pico, made by Cytron Technologies, definitely makes it very easy to get started with the new RPi Pico.
A one-sided SMD development board, packed with useful peripherals, in a 93.98 x 68.58mm form factor, with the following components already onboard:
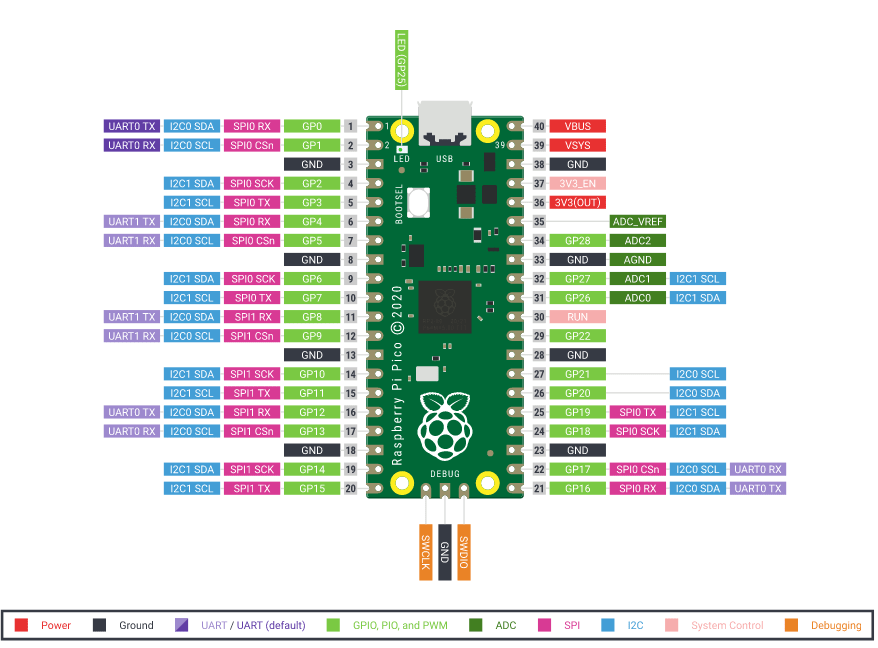
Access to all Raspberry Pi Pico’s pins on two 20 ways pin headers
LED indicators on all GPIO pins
3x programmable push button (GP20-22)
1x RGB LED – NeoPixel (GP28)
1x Piezo buzzer (GP18)
1x 3.5mm stereo audio jack (GP18-19)
1x Micro SD card slot (GP10-15)
1x ESP-01 socket (GP16-17)
6x Grove ports
Over the next few days, I will go into some of this exiting new development board`s features, as well as show you how to program it using Micropython as well as C/C++
UPDATE 5 February 2021
Although the Raspberry Pi Foundation has provided excellent documentation on programming the PICO with C/C++, I will not do any review of that here at this time. The reasons being the following:
1) It seems that PICO was indeed designed as a companion to a Raspberry PI 4B. All the C/C++ tools are geared towards that or Linux. I use Linux in my everyday computing life, but most of you don’t. 2) At the moment, the most reliable way that I can program this board in C/C++ is from the command line. Support for many IDE’s seems to be available. But it is PAINFUL, to say the least. VS Source or CLION or ECLIPSE, neither IDE’s that I like or use, due to their clutter and slow performance / unnecessary complexity etc. 3) It is possible to use MS Windows or a MAC, but same rules apply.
Another reason is that you have to enter BOOTSEL mode each time you want to upload or use a debugger, which, if you don’t have a PI, means another PICO. Plugging and unplugging a USB cable that often can not be good for the connector in the long term.
For these reasons, and to keep it simple and easily understandable for everyone, I shall keep to Micropython for the time being.
Please stay in touch for more updates, and feel free to contact me for more information.
Welcome to Part two of my RPi Pico Series. You can buy yours from Cytron Technologies. In this post, we will look at some more of the features of the board, as well as how to get started using this development board. I will focus on MicroPython in this post, and cover C/C++ in the next post.
But before we do that, lets run over some of the specifications of the board first… The Python Stuff will be at the end of this post…
Board Specifications
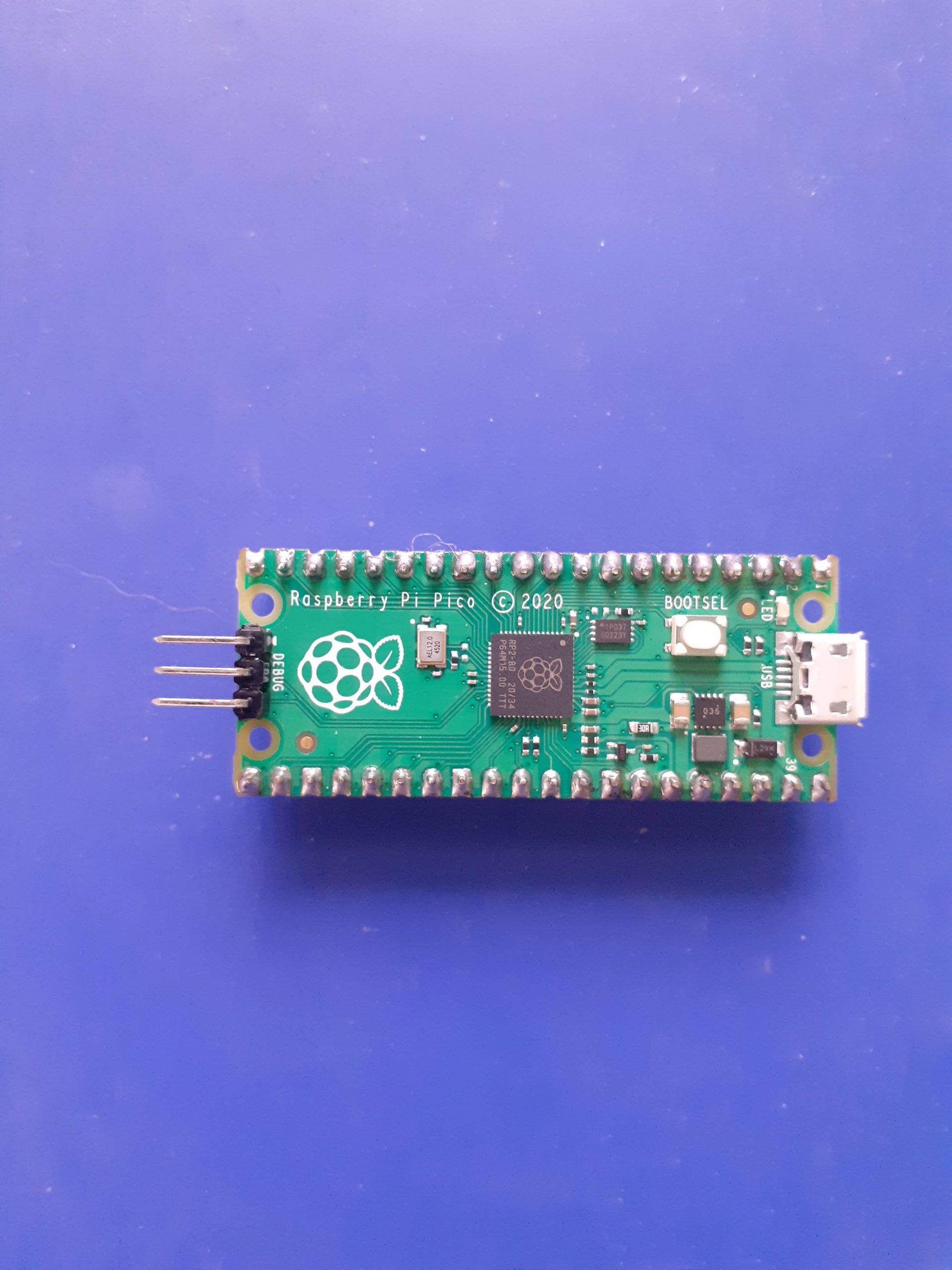
Raspberry Pi Pico is a low-cost, high-performance microcontroller board with flexible digital interfaces. Key features include:
RP2040 microcontroller chip designed by Raspberry Pi in the United Kingdom
Dual-core Arm Cortex M0+ processor, flexible clock running up to 133 MHz
264KB of SRAM, and 2MB of on-board Flash memory
Castellated module allows soldering direct to carrier boards
USB 1.1 with device and host support
Low-power sleep and dormant modes
Drag-and-drop programming using mass storage over USB
8 × Programmable I/O (PIO) state machines for custom peripheral support
Utilities
What is on your Pico?
If you have forgotten what has been programmed into your Raspberry Pi Pico, and the program was built using our Pico C/C++ SDK, it will usually have a name and other useful information embedded into the binary. You can use the Picotool command line utility to find out these details. Full instructions on how to use Picotool to do this are available in the ‘getting started‘ documentation.
It is possible to use one Raspberry Pi Pico to debug another Pico. This is possible via picoprobe, an application that allows a Pico to act as a USB → SWD and UART converter. This makes it easy to use a Pico on non-Raspberry Pi platforms such as Windows, Mac, and Linux computers where you don’t have GPIOs to connect directly to your Pico. Full instructions on how to use Picoprobe to do this are available in the ‘getting started‘ documentation.
Pico’s BOOTSEL mode lives in read-only memory inside the RP2040 chip, and can’t be overwritten accidentally. No matter what, if you hold down the BOOTSEL button when you plug in your Pico, it will appear as a drive onto which you can drag a new UF2 file. There is no way to brick the board through software. However, there are some circumstances where you might want to make sure your Flash memory is empty. You can do this by dragging and dropping a special UF2 binary onto your Pico when it is in mass storage mode.
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Iden
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
// Obliterate the contents of flash. This is a silly thing to do if you are
// trying to run this program from flash, so you should really load and run
// directly from SRAM. You can enable RAM-only builds for all targets by doing:
//
// cmake -DPICO_NO_FLASH=1 ..
//
// in your build directory. We've also forced no-flash builds for this app in
// particular by adding:
//
// pico_set_binary_type(flash_nuke no_flash)
//
// To the CMakeLists.txt app for this file. Just to be sure, we can check the
// define:
#if !PICO_NO_FLASH
#error "This example must be built to run from SRAM!"
#endif
#include "pico/stdlib.h"
#include "hardware/flash.h"
#include "pico/bootrom.h"
int main() {
flash_range_erase(0, PICO_FLASH_SIZE_BYTES);
// Leave an eyecatcher pattern in the first page of flash so picotool can
// more easily check the size:
static const uint8_t eyecatcher[FLASH_PAGE_SIZE] = "NUKE";
flash_range_program(0, eyecatcher, FLASH_PAGE_SIZE);
// Flash LED for success
gpio_init(PICO_DEFAULT_LED_PIN);
gpio_set_dir(PICO_DEFAULT_LED_PIN, GPIO_OUT);
for (int i = 0; i < 3; ++i) {
gpio_put(PICO_DEFAULT_LED_PIN, 1);
sleep_ms(100);
gpio_put(PICO_DEFAULT_LED_PIN, 0);
sleep_ms(100);
}
// Pop back up as an MSD drive
reset_usb_boot(0, 0);
}tifier: BSD-3-Clause
*/
// Obliterate the contents of flash. This is a silly thing to do if you are
// trying to run this program from flash, so you should really load and run
// directly from SRAM. You can enable RAM-only builds for all targets by doing:
//
// cmake -DPICO_NO_FLASH=1 ..
//
// in your build directory. We've also forced no-flash builds for this app in
// particular by adding:
//
// pico_set_binary_type(flash_nuke no_flash)
//
// To the CMakeLists.txt app for this file. Just to be sure, we can check the
// define:
#if !PICO_NO_FLASH
#error "This example must be built to run from SRAM!"
#endif
#include "pico/stdlib.h"
#include "hardware/flash.h"
#include "pico/bootrom.h"
int main() {
flash_range_erase(0, PICO_FLASH_SIZE_BYTES);
// Leave an eyecatcher pattern in the first page of flash so picotool can
// more easily check the size:
static const uint8_t eyecatcher[FLASH_PAGE_SIZE] = "NUKE";
flash_range_program(0, eyecatcher, FLASH_PAGE_SIZE);
// Flash LED for success
gpio_init(PICO_DEFAULT_LED_PIN);
gpio_set_dir(PICO_DEFAULT_LED_PIN, GPIO_OUT);
for (int i = 0; i < 3; ++i) {
gpio_put(PICO_DEFAULT_LED_PIN, 1);
sleep_ms(100);
gpio_put(PICO_DEFAULT_LED_PIN, 0);
sleep_ms(100);
}
// Pop back up as an MSD drive
reset_usb_boot(0, 0);
}
Getting Started with MicroPython on the RPi Pico
Drag and drop MicroPython
You can program your Pico by connecting it to a computer via USB, then dragging and dropping a file onto it, so we’ve put together a downloadable UF2 file to let you install MicroPython more easily. Following the procedure below, you can install MicroPython onto the Pico in a few seconds…
1. Download and unzip the UF2 file below into a folder on your computer.
2. Hold down the Bootsel button on the Pico, and connect it to a USB cable that was already connected to your computer. ( This means, connect ons side of the usb cable to the computer, but dont connect the Pico yet. then hold down BOOTSEL, and connect the cable to the pico)
3. Now, release the BootSEL button
4. After a few Seconds, you will have a new USB storage device on your computer, called RPI-RP2
5. Drag the UF2 file into this USB Storage device. The Pico will reboot… You have now installed MicroPython on your RPi Pico