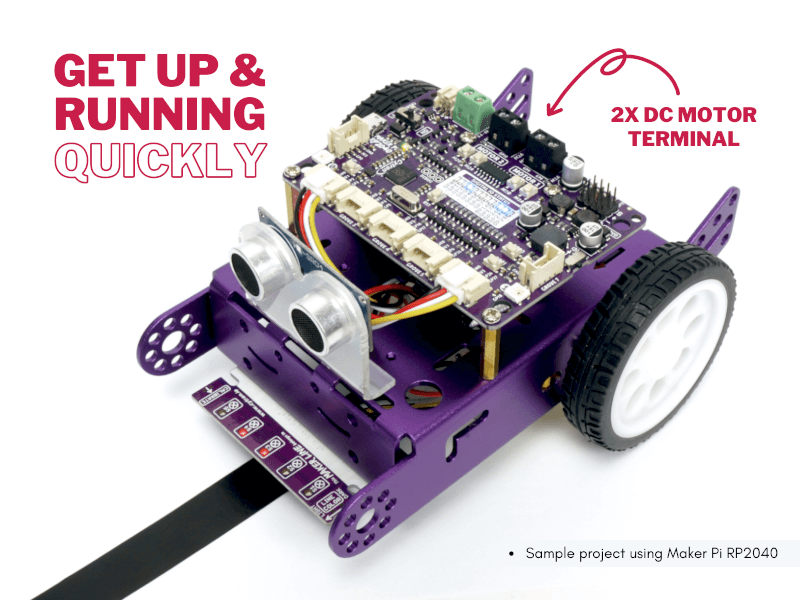
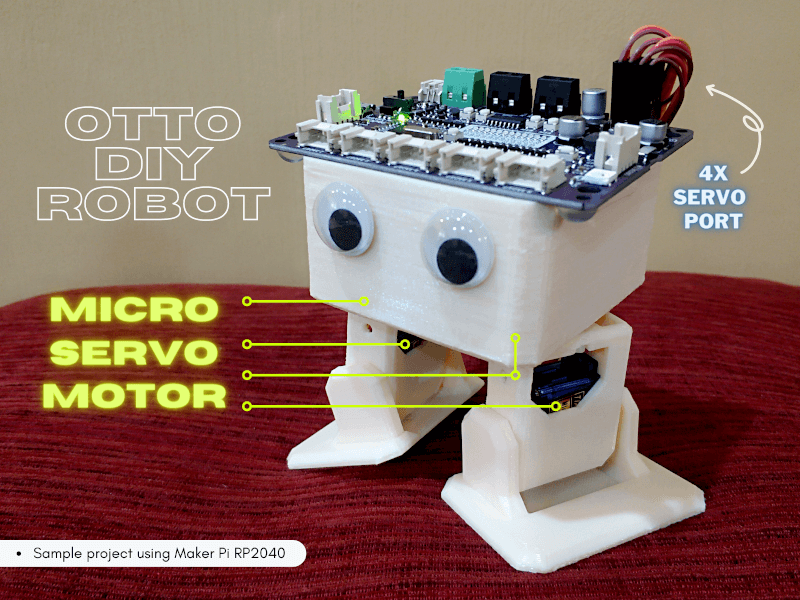
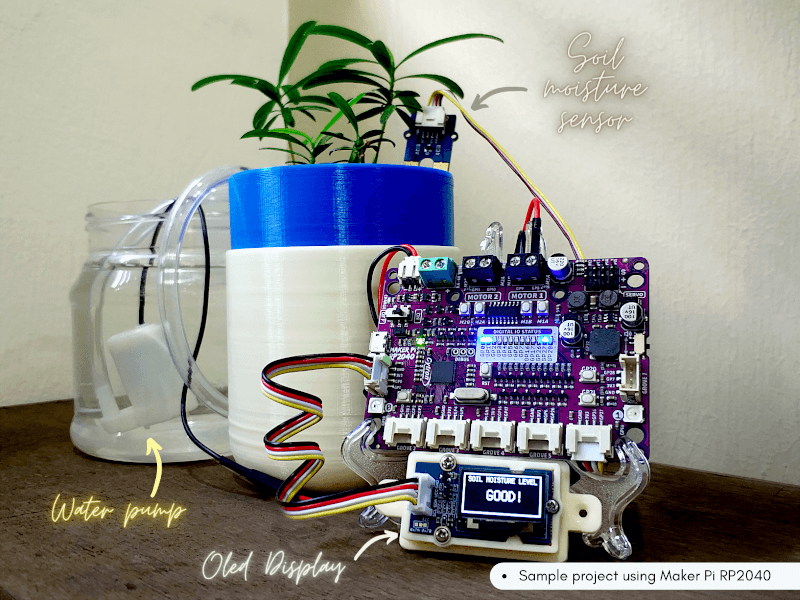
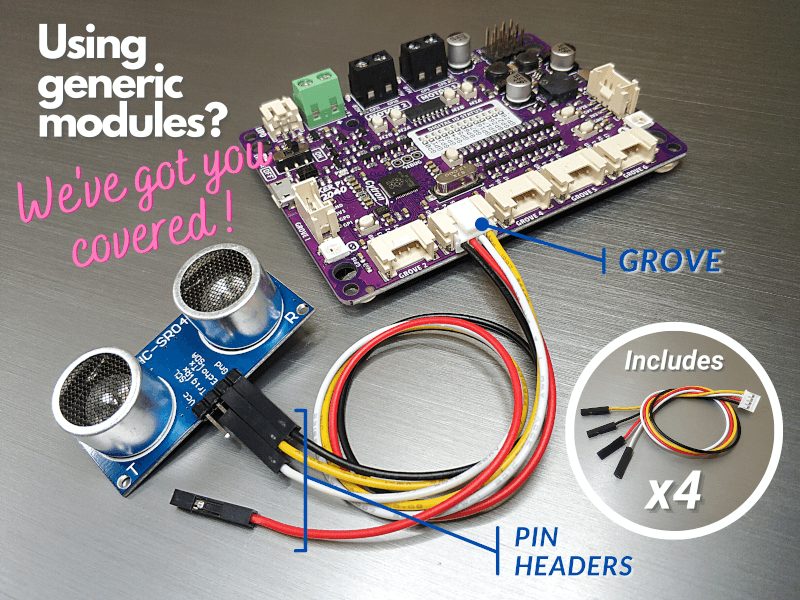
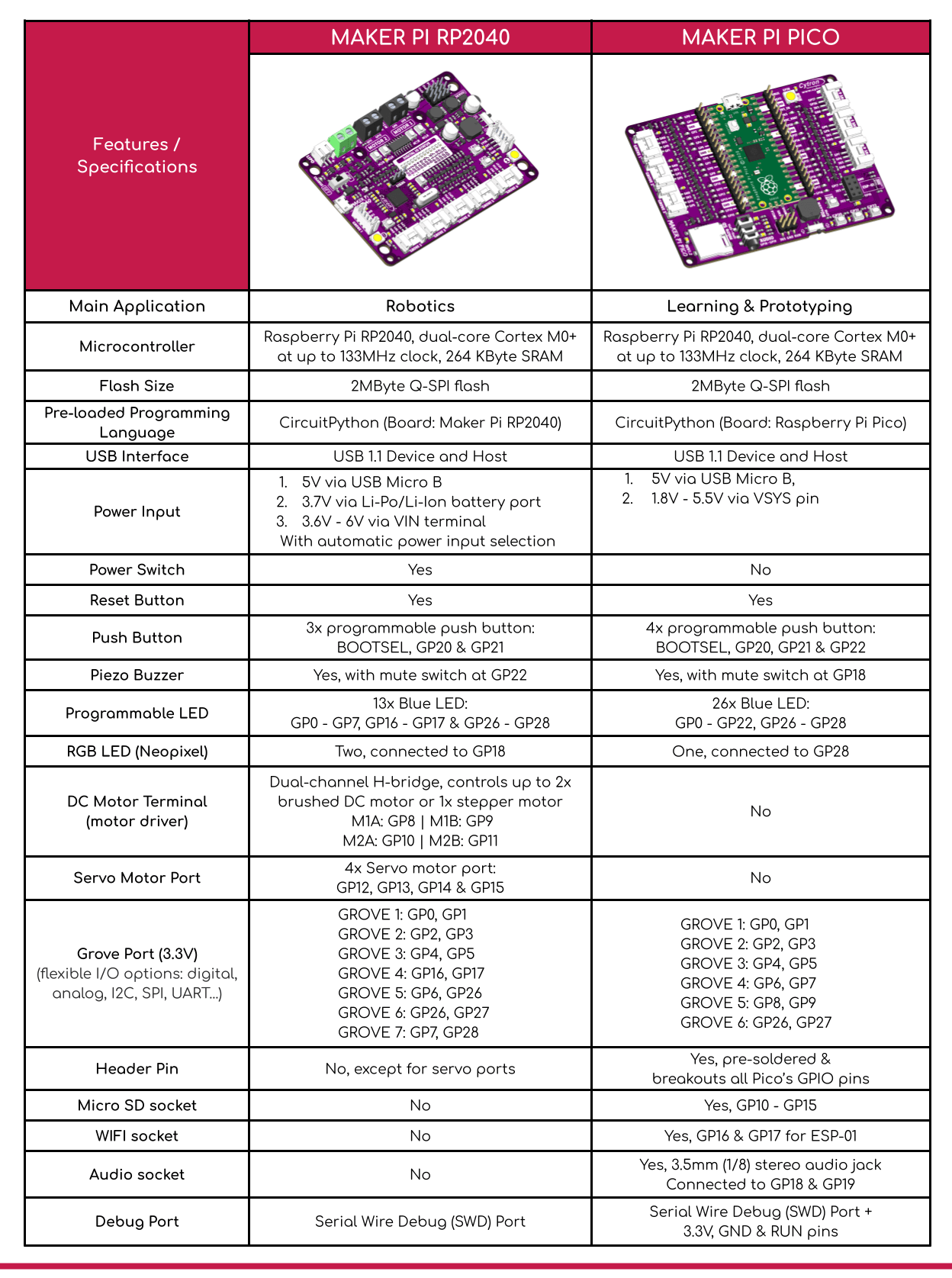
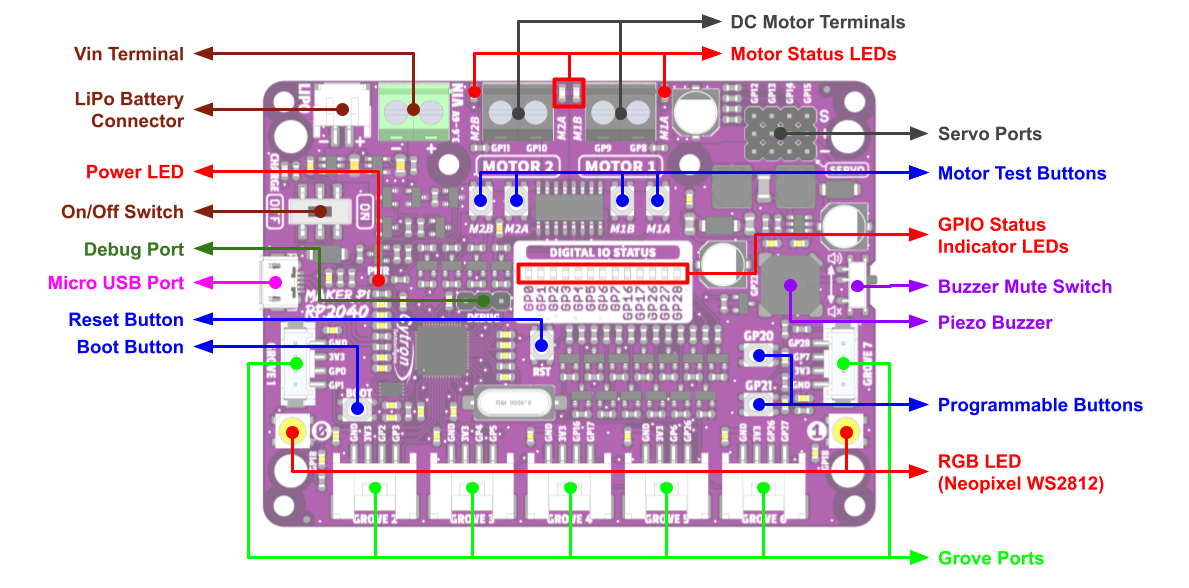
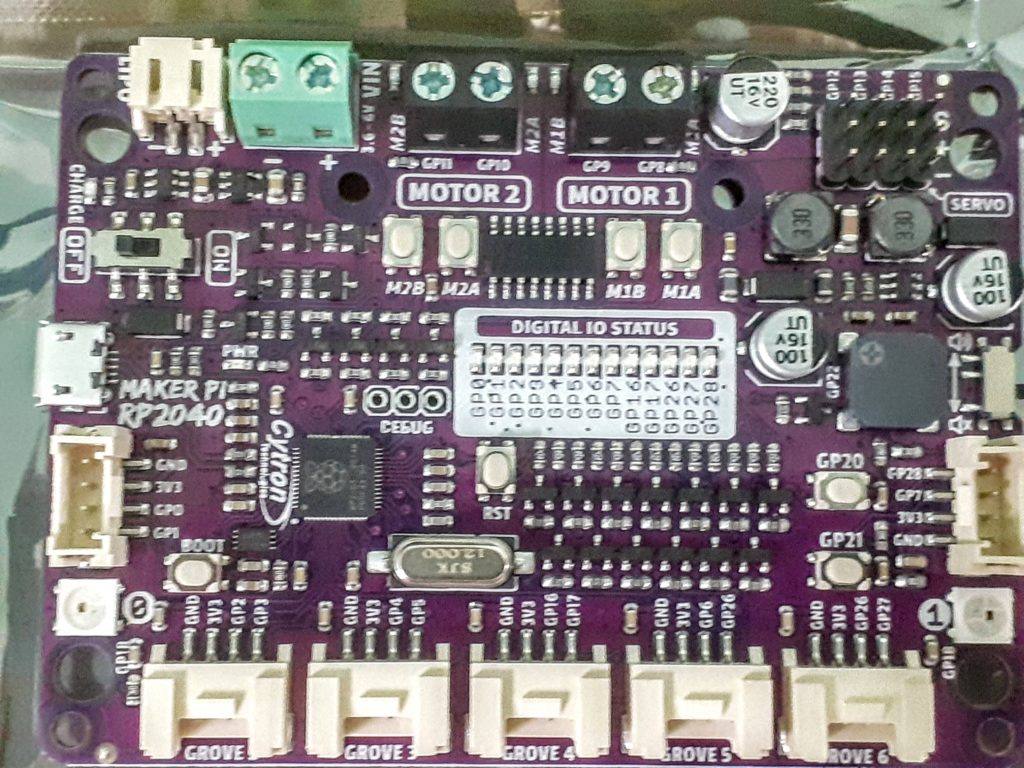
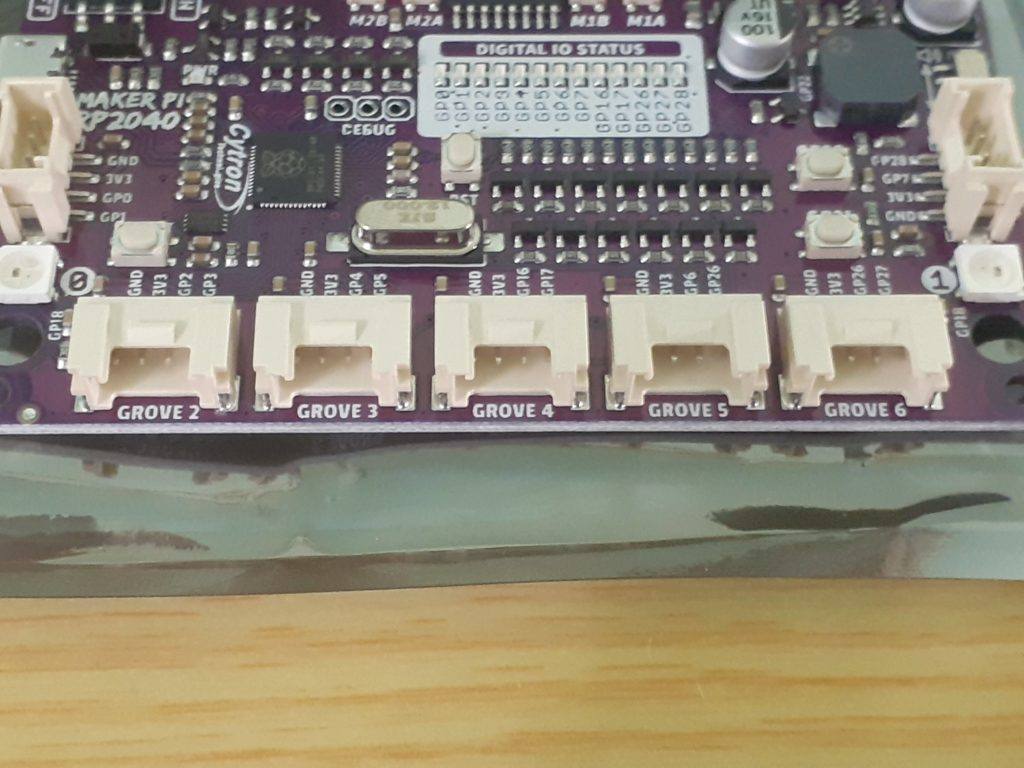
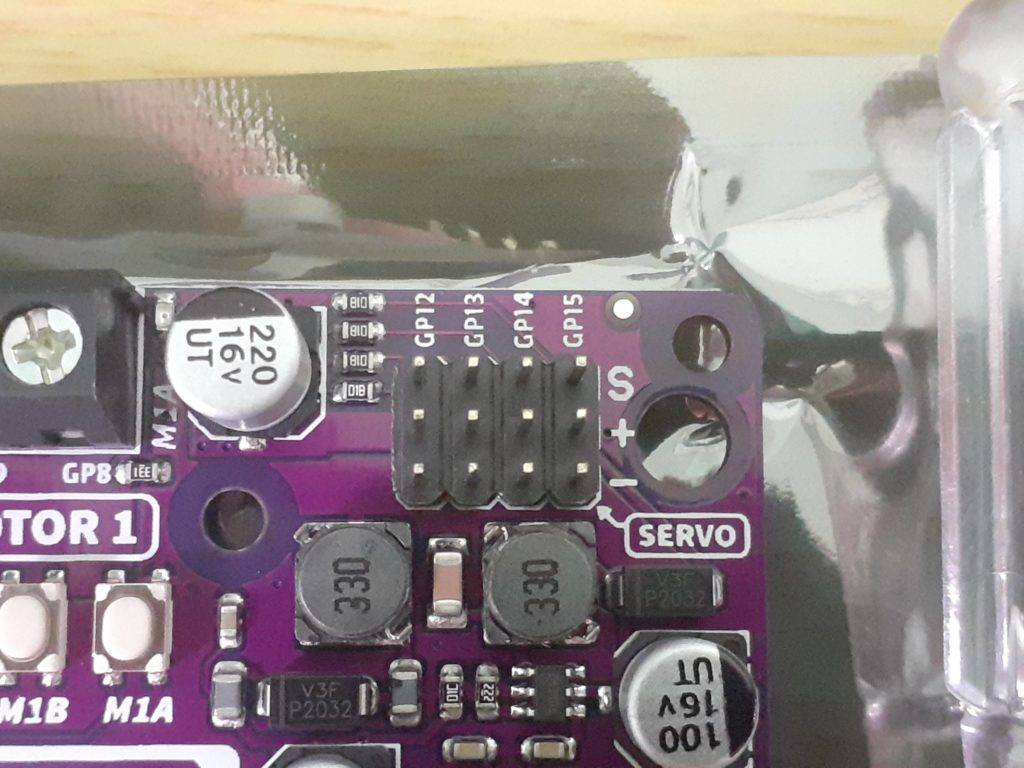
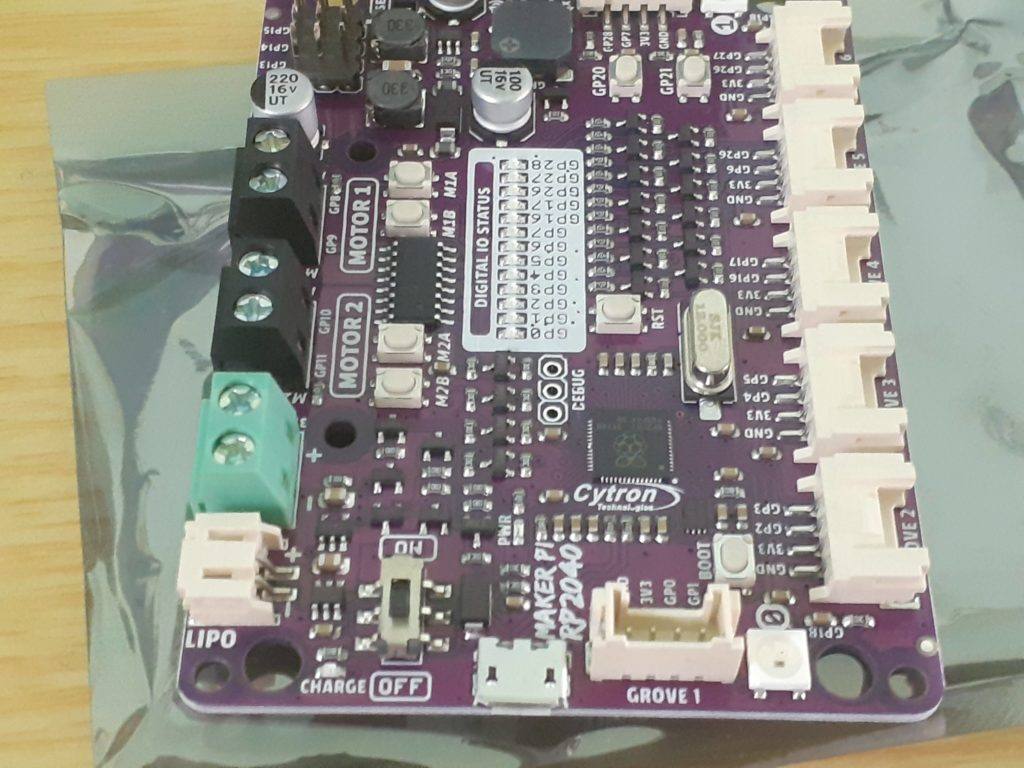
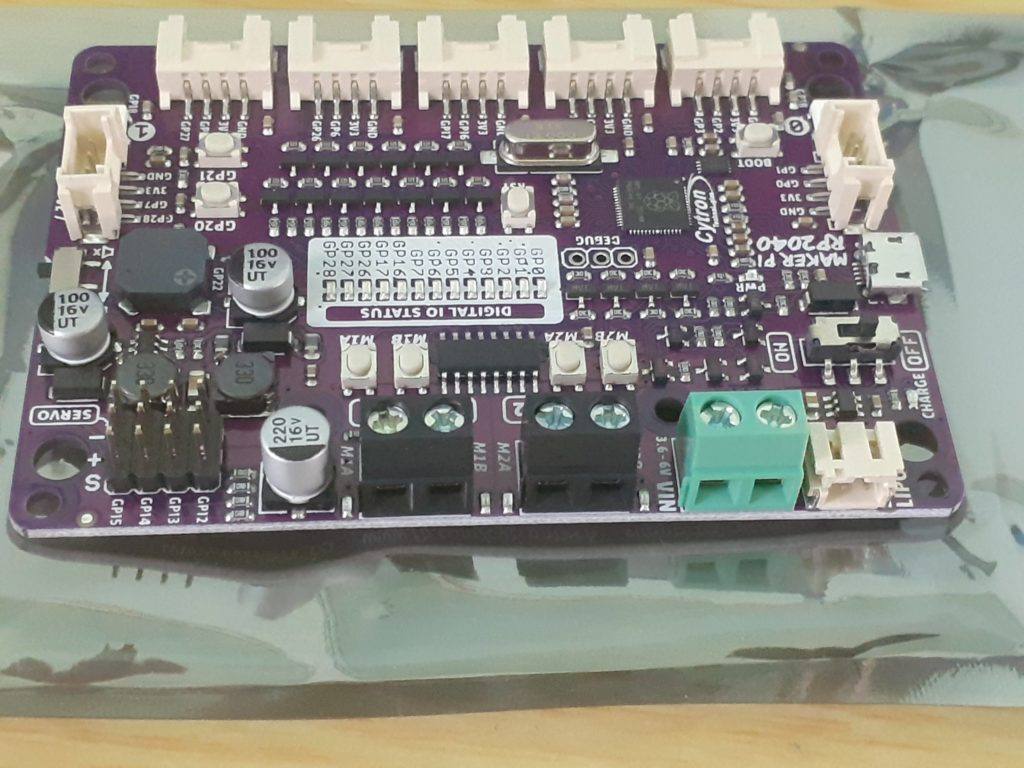
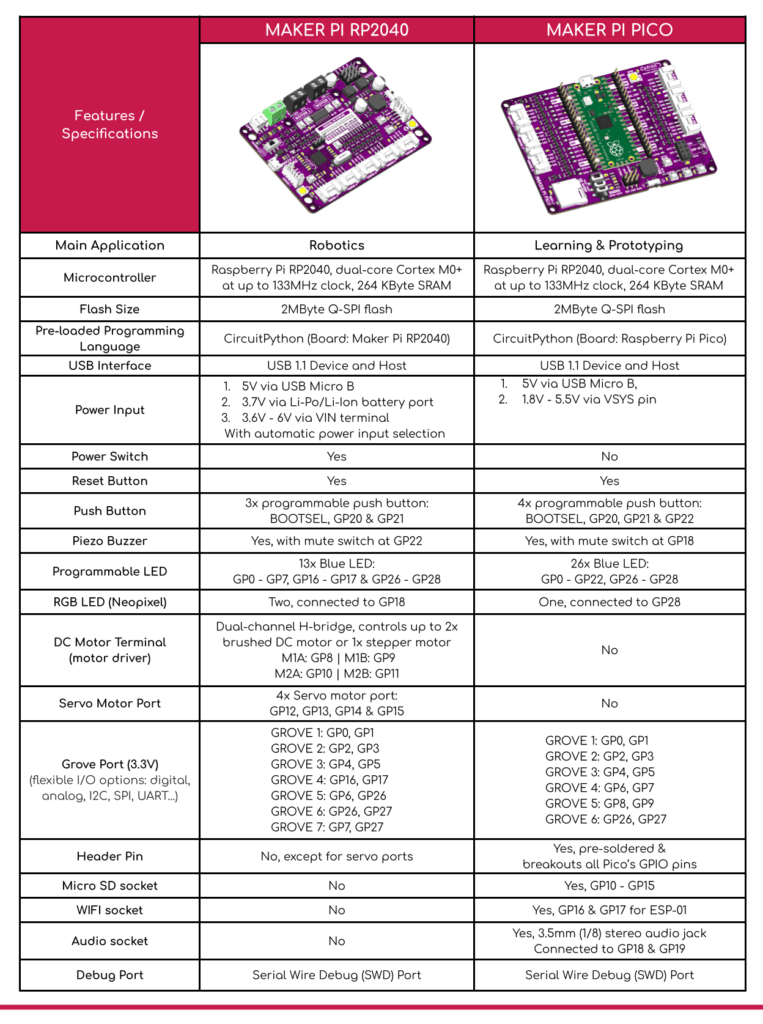
Cytron Maker Pi RP2040 features the first microcontroller designed by Raspberry Pi – RP2040, embedded on a robot controller board. This board comes with a dual-channel DC motor driver, 4 servo motor ports and 7 Grove I/O connectors, ready for your next DIY robot/motion control project. Now you can build a robot while trying out the new RP2040 chip.
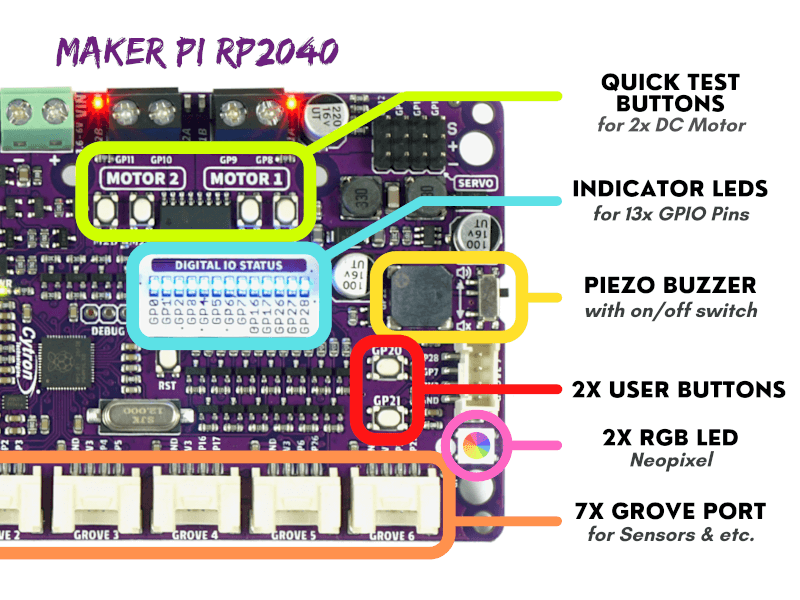
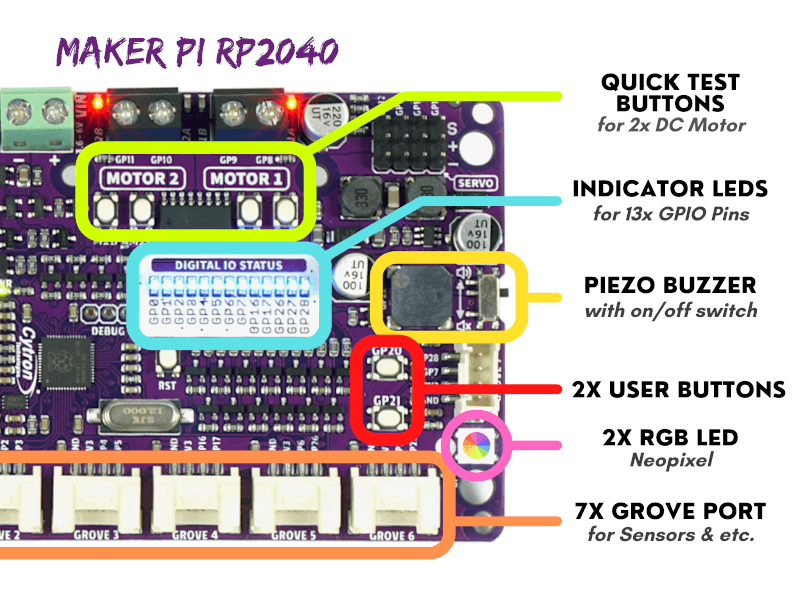
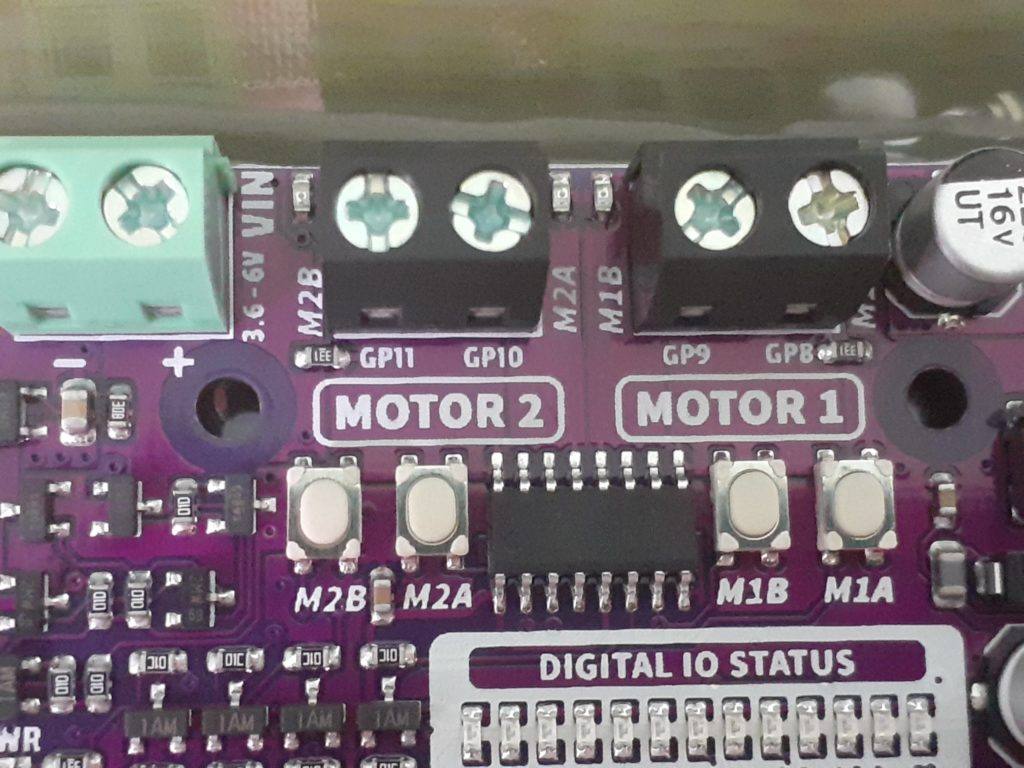
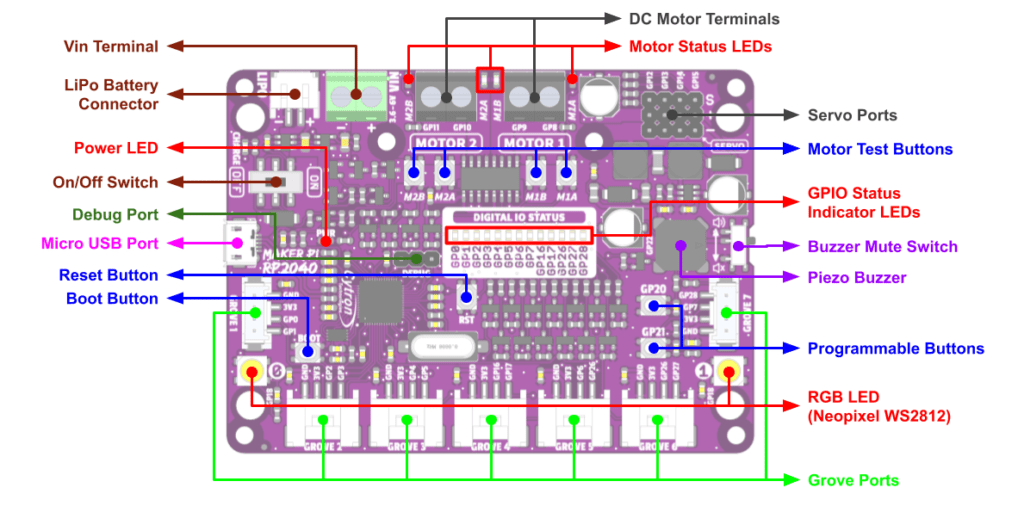
The DC motor driver on board is able to control 2x brushed DC motors or 1x bipolar/unipolar stepper motor rated from 3.6V to 6V, providing up to 1A current per channel continuously. The built-in Quick Test buttons and motor output LEDs allow a functional test of the motor driver in a quick and convenient way, without the need of writing any code. Vmotor for both DC and servo motors depends on the input voltage supplied to the board.
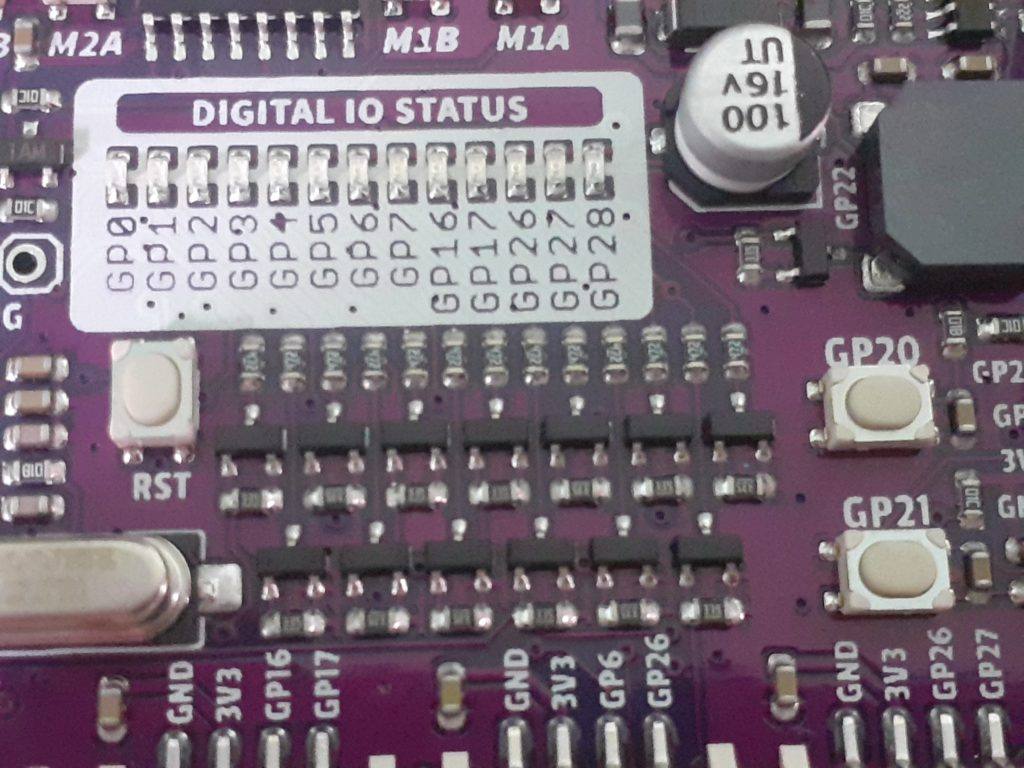
Maker Pi RP2040 features all the goodness of Cytron’s Maker series products. It too has lots of LEDs useful for troubleshooting (& visual effects), is able to make quite some noise with the onboard piezo buzzer and comes with push buttons ready to detect your touch.
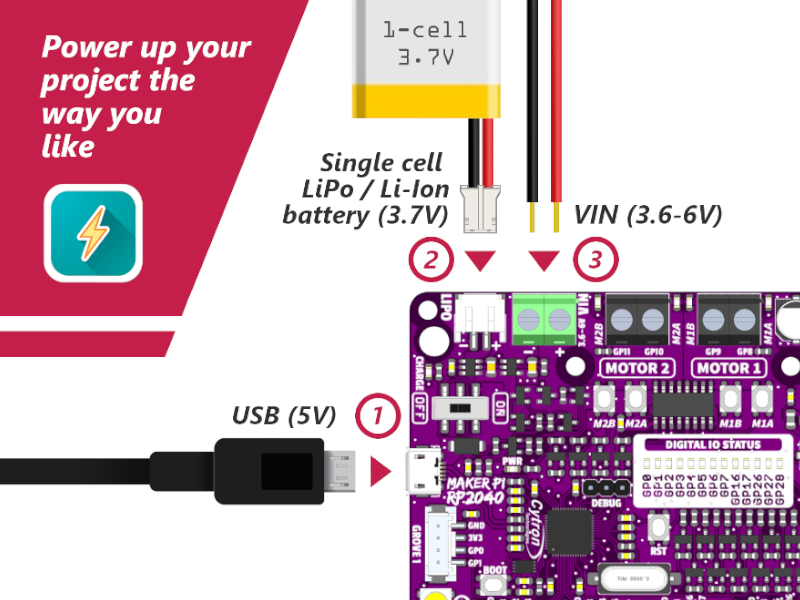
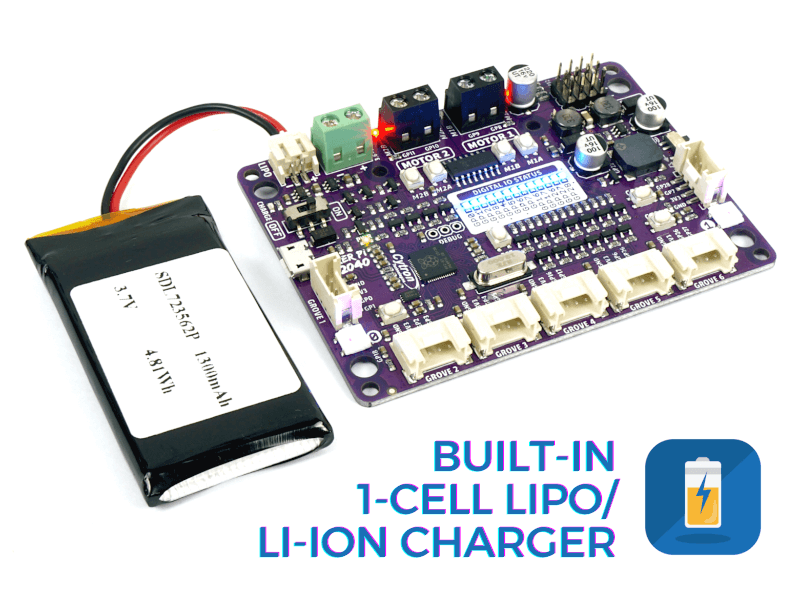
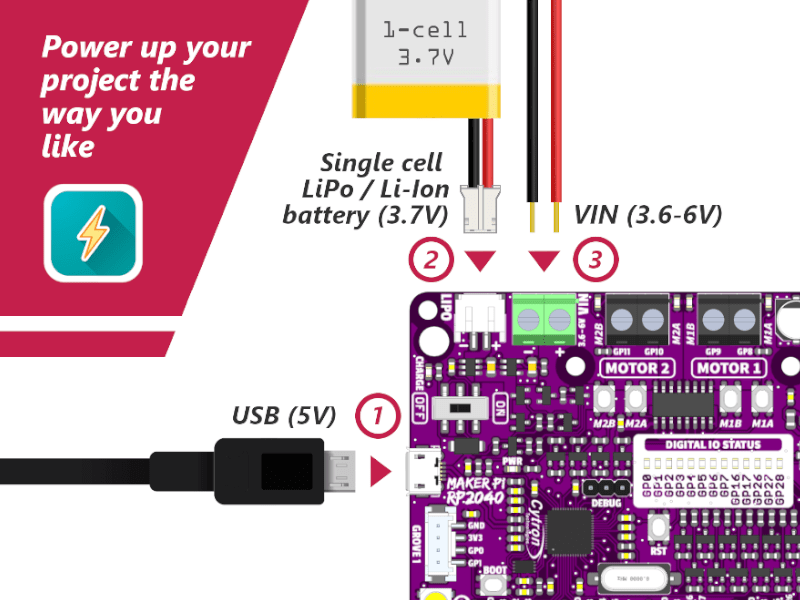
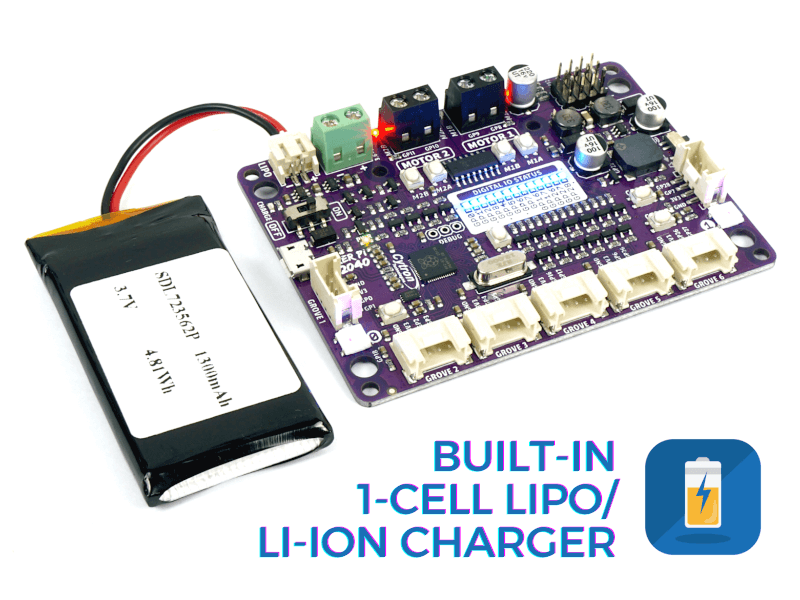
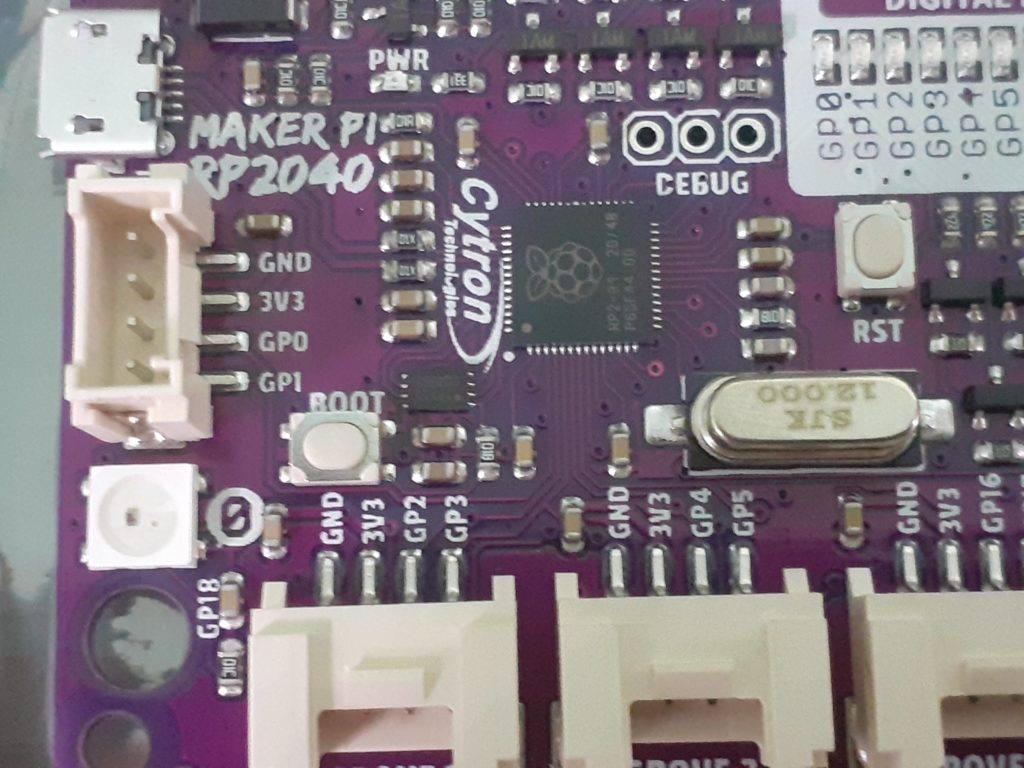
There are three ways to supply power to the Maker Pi RP2040 – via USB (5V) socket, with a single cell LiPo/Li-Ion battery or through the VIN (3.6-6V) terminals. However, only one power source is needed to power up both controller board and motors at a time. Power supply from all these power sources can all be controlled with the power on/off switch onboard.
Cytron Maker Pi RP2040 is basically the Raspberry Pi Pico + Maker series’ goodness + Robot controller & other useful features. Therefore this board is compatible with the existing Pico ecosystem. Software, firmware, libraries and resources that are developed for Pico should work seamlessly with Cytron Maker Pi RP2040 too.
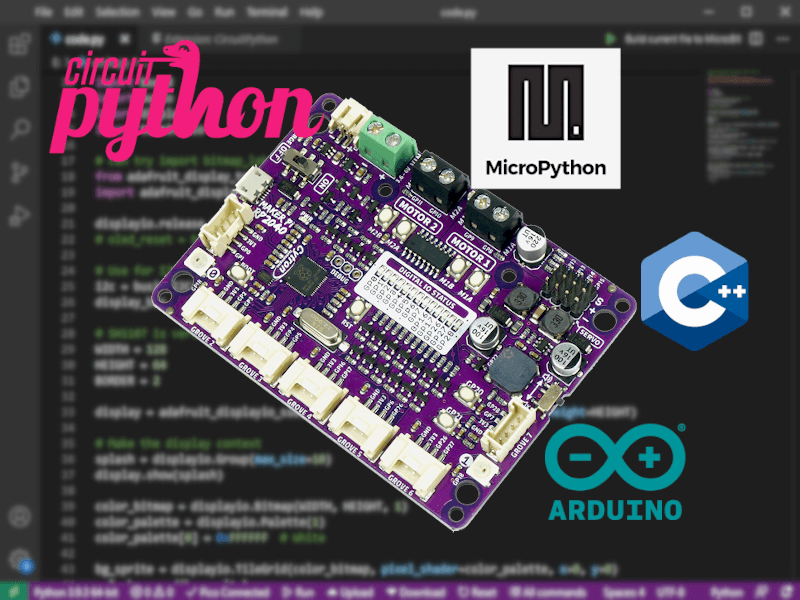
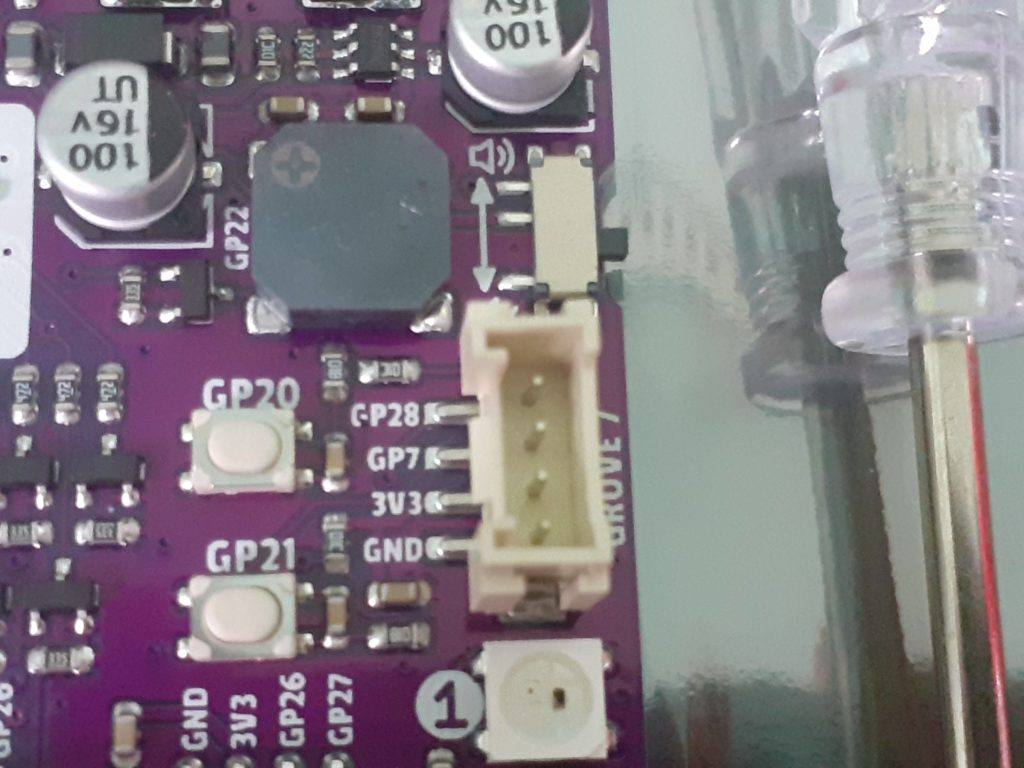
CircuitPython is preloaded on the Maker Pi RP2040 and it runs a simple demo program right out of the box. Connect it to your computer via USB micro cable and turn it on, you will be greeted by a melody tune and LEDs running light. Press GP20 and GP21 push buttons to toggle the LEDs on/off while controlling any DC and servo motors connected to it to move and stop. With this demo code, you get to test the board the moment you receive it!
While connected to your computer, a new CIRCUITPY drive appears. Explore and edit the demo code (code.py & lib folder) with any code editor you like, save any changes to the drive and you shall see it in action in no time. That’s why we embrace CircuitPython – it’s very easy to get started. Wish to use other programming languages? Sure, you are free to use MicroPython and C/C++ for Pico/RP2040. For those of you who love the Arduino ecosystem, please take a look at this official news by Arduino and also the unofficial Pico Arduino Core by Earle F. Philhower.
Cytron Technologies has done it again, this time by releasing an in-house designed complete robotics controller board, based on the brand new RP2040 MCU from the Raspberry Pi Foundation.
This post will be part one of a detailed look at this new product.. So, as it is an introduction, lets get some technical specs and features…
Cytron Maker Pi RP2040 features the first micro-controller designed by Raspberry Pi – RP2040, embedded on a robot controller board. The board also comes with dual channel DC motor driver, 4 servo motor ports and 7 Grove I/O connectors, ready for your next DIY robot / motion control project. Now you can build robot, while trying out the new RP2040 chip.
The DC motor driver onboard is able to control 2x brushed DC motors or 1x bipolar/unipolar stepper motor rated from 3.6V to 6V, providing up to 1A current per channel continuously. The built-in Quick Test buttons and motor output LEDs allow functional test of the motor driver in a quick and convenient way, without the need of writing any code. Vmotor for both DC and servo motors depends on the input voltage supplied to the board.
ker Pi RP2040 features all the goodness of Cytron’s Maker series products. It too has lots of LEDs useful for troubleshooting (& visual effects), is able to make quite some noise with the onboard piezo buzzer and comes with push buttons ready to detect your touch.
There are three ways to supply power to the Maker Pi RP2040 – via USB (5V) socket, with a single cell LiPo/Li-Ion battery or through the VIN (3.6-6V) terminals. However only one power source is needed to power up both controller board and motors at a time. Power supply from all these power sources can all be controlled with the power on/off switch onboard.
Cytron Maker Pi RP2040 is basically the Raspberry Pi Pico + Maker series’ goodness + Robot controller & other useful features. Therefore this board is compatible with the existing Pico ecosystem. Software, firmware, libraries and resources that are developed for Pico should work seamlessly with Cytron Maker Pi RP2040 too.
CircuitPython is preloaded on the Maker Pi RP2040 and it runs a simple demo program right out-of-the-box. Connect it to your computer via USB micro cable and turn it on, you will be greeted by a melody tune and LEDs running light. Press GP20 and GP21 push buttons to toggle the LEDs on/off, while controlling any DC and servo motors connected to it to move and stop. With this demo code, you get to test the board the moment you receive it!
Out-of-the-box Demo for Cytron Maker Pi RP2040
This demo code is written in CircuitPython and it serves
as an easy quality check when you first receive the board.
#
It plays a melody upon power up (slide power switch to ON)
and shows running lights (blue LEDs) at the same time.
Then the two RGB LEDs will animate the colors, while the
program checking push buttons' state, repeatedly.
Press GP20 button to play a short melody, lights up all
blue LEDs, move servo motors to 0 degree and run DC motors
at 50% and -50% speeds.
Press GP21 button to play another melody, turn off all blue
LEDs, move servo motors to 180 degree & brake DC motors.
Maker Pi RP2040 also has four DC motors quick test buttons
built-in. You may press the onboard M1A, M1B, M2A or M2B
push buttons to run your motors without writing any code.
#
More info:
http://www.cytron.io/p-maker-pi-rp2040
https://circuitpython.org/board/raspberry_pi_pico
#
Email: support@cytron.io
*
import board
import digitalio
import neopixel
import simpleio
import time
import pwmio
from adafruit_motor import servo, motor
Initialize LEDs
LEDs placement on Maker Pi RP2040
LED_PINS = [board.GP0,
board.GP1,
board.GP2,
board.GP3,
board.GP4,
board.GP5,
board.GP6,
board.GP7,
board.GP16,
board.GP17,
board.GP26,
board.GP27,
board.GP28]
LEDS = []
for pin in LED_PINS:
# Set pins as digital output
digout = digitalio.DigitalInOut(pin)
digout.direction = digitalio.Direction.OUTPUT
LEDS.append(digout)
Initialize Neopixel RGB LEDs
pixels = neopixel.NeoPixel(board.GP18, 2)
pixels.fill(0)
Melody
MELODY_NOTE = [659, 659, 0, 659, 0, 523, 659, 0, 784]
MELODY_DURATION = [0.15, 0.15, 0.15, 0.15, 0.15, 0.15, 0.15, 0.15, 0.2]
Define pin connected to piezo buzzer
PIEZO_PIN = board.GP22
Initialize buttons
btn1 = digitalio.DigitalInOut(board.GP20)
btn2 = digitalio.DigitalInOut(board.GP21)
btn1.direction = digitalio.Direction.INPUT
btn2.direction = digitalio.Direction.INPUT
btn1.pull = digitalio.Pull.UP
btn2.pull = digitalio.Pull.UP
Initialize servos
50% duty cycle: 2**15 = 32768 = 1/2 of 65536 (16-bit)
servo_motors = [] # create an array and add servo objects.
servo_motors.append(servo.Servo(pwmio.PWMOut(board.GP12, duty_cycle=215, frequency=50))) servo_motors.append(servo.Servo(pwmio.PWMOut(board.GP13, duty_cycle=215, frequency=50)))
servo_motors.append(servo.Servo(pwmio.PWMOut(board.GP14, duty_cycle=215, frequency=50))) servo_motors.append(servo.Servo(pwmio.PWMOut(board.GP15, duty_cycle=215, frequency=50)))
Initialize DC motors
m1a = pwmio.PWMOut(board.GP8, frequency=50)
m1b = pwmio.PWMOut(board.GP9, frequency=50)
motor1 = motor.DCMotor(m1a, m1b)
m2a = pwmio.PWMOut(board.GP10, frequency=50)
m2b = pwmio.PWMOut(board.GP11, frequency=50)
motor2 = motor.DCMotor(m2a, m2b)
-------------------------------------------------
ON START: Show running light and play melody
-------------------------------------------------
for i in range(len(LEDS)):
LEDS[i].value = True
if i < len(MELODY_NOTE): # Play melody tones simpleio.tone(PIEZO_PIN, MELODY_NOTE[i], duration=MELODY_DURATION[i]) else: # Light up the remainding LEDs time.sleep(0.15)
Turn off LEDs one-by-one very quickly
for i in range(len(LEDS)):
LEDS[i].value = False
time.sleep(0.02)
color = 0
state = 0
-------------------------------------------------
FOREVER LOOP: Check buttons & animate RGB LEDs
-------------------------------------------------
while True:
# Check button 1 (GP20) if not btn1.value: # button 1 pressed # Light up all LEDs for i in range(len(LEDS)): LEDS[i].value = True # Move servos to 0 degree for i in range(len(servo_motors)): servo_motors[i].angle = 0 # Move motors at 50% speed motor1.throttle = 0.5 # motor1.throttle = 1 or -1 for full speed motor2.throttle = -0.5 # Play tones simpleio.tone(PIEZO_PIN, 262, duration=0.1) simpleio.tone(PIEZO_PIN, 659, duration=0.15) simpleio.tone(PIEZO_PIN, 784, duration=0.2) # Check button 2 (GP21) elif not btn2.value: # button 2 pressed # Turn off all LEDs for i in range(len(LEDS)): LEDS[i].value = False # Move servos to 180 degree for i in range(len(servo_motors)): servo_motors[i].angle = 180 # Brake motors motor1.throttle = 0 # motor1.throttle = None to spin freely motor2.throttle = 0 # Play tones simpleio.tone(PIEZO_PIN, 784, duration=0.1) simpleio.tone(PIEZO_PIN, 659, duration=0.15) simpleio.tone(PIEZO_PIN, 262, duration=0.2) # Animate RGB LEDs if state == 0: if color < 0x101010: color += 0x010101 # increase rgb colors to 0x10 each else: state += 1 elif state == 1: if (color & 0x00FF00) > 0: color -= 0x000100 # decrease green to zero else: state += 1 elif state == 2: if (color & 0xFF0000) > 0: color -= 0x010000 # decrease red to zero else: state += 1 elif state == 3: if (color & 0x00FF00) < 0x1000: color += 0x000100 # increase green to 0x10 else: state += 1 elif state == 4: if (color & 0x0000FF) > 0: color -= 1 # decrease blue to zero else: state += 1 elif state == 5: if (color & 0xFF0000) < 0x100000: color += 0x010000 # increase red to 0x10 else: state += 1 elif state == 6: if (color & 0x00FF00) > 0: color -= 0x000100 # decrease green to zero else: state += 1 elif state == 7: if (color & 0x00FFFF) < 0x001010: color += 0x000101 # increase gb to 0x10 else: state = 1 pixels.fill(color) # fill the color on both RGB LEDs # Sleep to debounce buttons & change the speed of RGB color swipe time.sleep(0.05)